 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Movement Predictions of Traffic Actors in Bird's-Eye View Models using GANs and Differentiable Trajectory Rasterization
Apr 14, 2020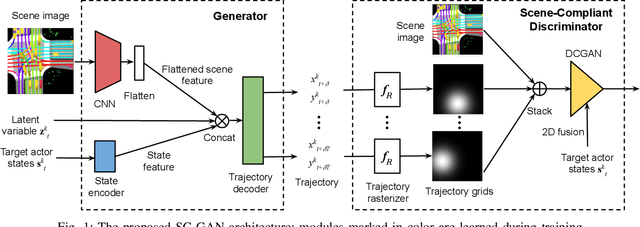

One of the most critical pieces of the self-driving puzzle is the task of predicting future movement of surrounding traffic actors, which allows the autonomous vehicle to safely and effectively plan its future route in a complex world. Recently, a number of algorithms have been proposed to address this important problem, spurred by a growing interest of researchers from both industry and academia. Methods based on top-down scene rasterization on one side and Generative Adversarial Networks (GANs) on the other have shown to be particularly successful, obtaining state-of-the-art accuracies on the task of traffic movement prediction. In this paper we build upon these two directions and propose a raster-based conditional GAN architecture, powered by a novel differentiable rasterizer module at the input of the conditional discriminator that maps generated trajectories into the raster space in a differentiable manner. This simplifies the task for the discriminator as trajectories that are not scene-compliant are easier to discern, and allows the gradients to flow back forcing the generator to output better, more realistic trajectories. We evaluated the proposed method on a large-scale, real-world data set, showing that it outperforms state-of-the-art GAN-based baselines.