 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA newborn embodied Turing test for view-invariant object recognition
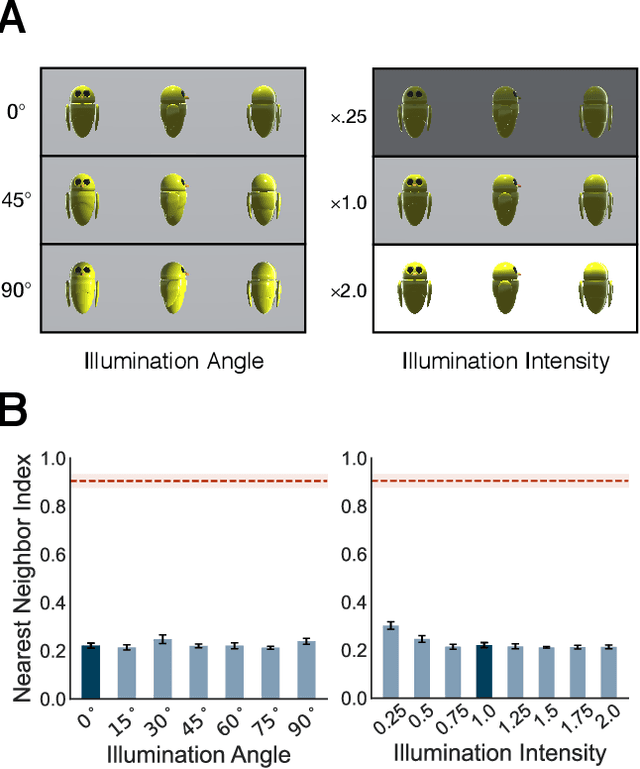
Jun 08, 2023Recent progress in artificial intelligence has renewed interest in building machines that learn like animals. Almost all of the work comparing learning across biological and artificial systems comes from studies where animals and machines received different training data, obscuring whether differences between animals and machines emerged from differences in learning mechanisms versus training data. We present an experimental approach-a "newborn embodied Turing Test"-that allows newborn animals and machines to be raised in the same environments and tested with the same tasks, permitting direct comparison of their learning abilities. To make this platform, we first collected controlled-rearing data from newborn chicks, then performed "digital twin" experiments in which machines were raised in virtual environments that mimicked the rearing conditions of the chicks. We found that (1) machines (deep reinforcement learning agents with intrinsic motivation) can spontaneously develop visually guided preference behavior, akin to imprinting in newborn chicks, and (2) machines are still far from newborn-level performance on object recognition tasks. Almost all of the chicks developed view-invariant object recognition, whereas the machines tended to develop view-dependent recognition. The learning outcomes were also far more constrained in the chicks versus machines. Ultimately, we anticipate that this approach will help researchers develop embodied AI systems that learn like newborn animals.
Parallel development of social preferences in fish and machines
May 18, 2023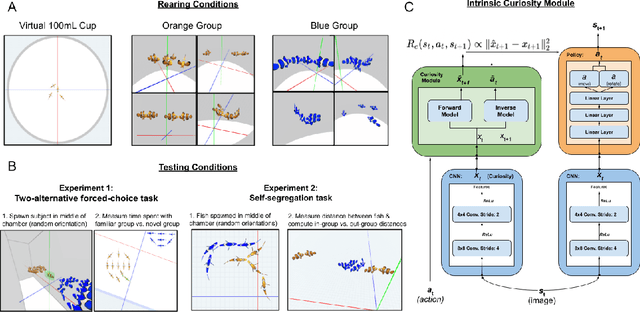
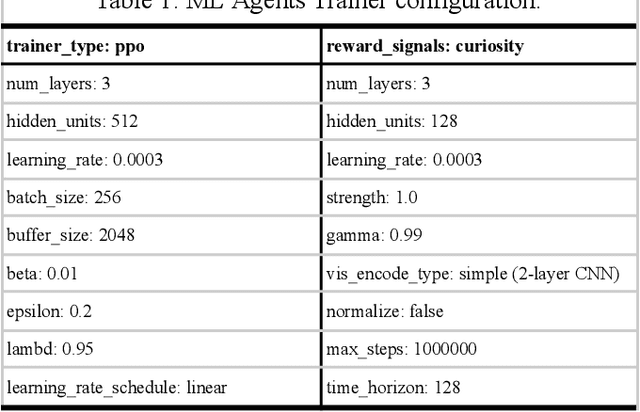
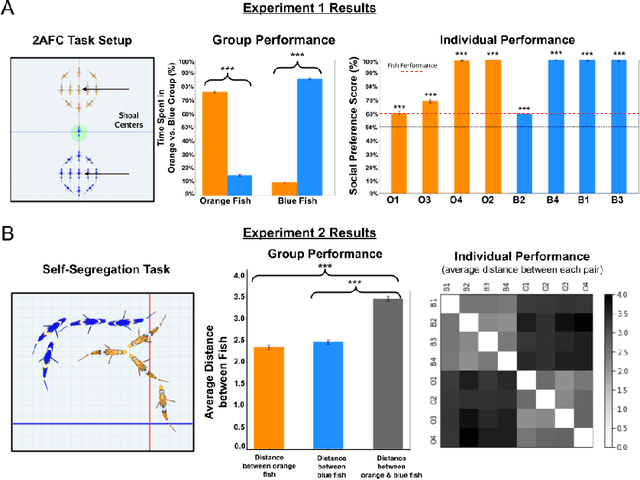
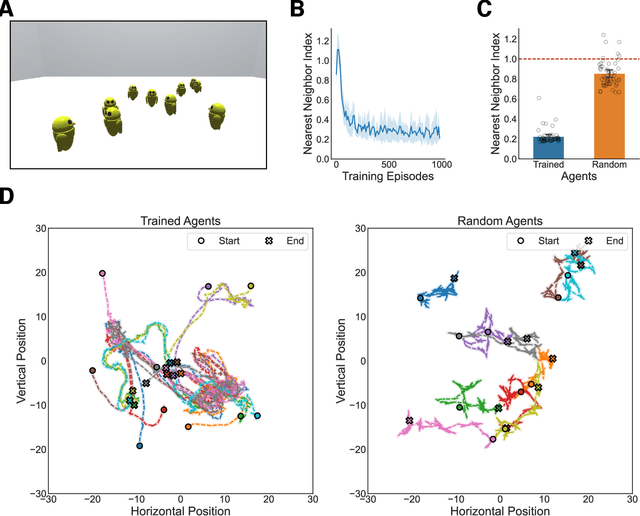
What are the computational foundations of social grouping? Traditional approaches to this question have focused on verbal reasoning or simple (low-dimensional) quantitative models. In the real world, however, social preferences emerge when high-dimensional learning systems (brains and bodies) interact with high-dimensional sensory inputs during an animal's embodied interactions with the world. A deep understanding of social grouping will therefore require embodied models that learn directly from sensory inputs using high-dimensional learning mechanisms. To this end, we built artificial neural networks (ANNs), embodied those ANNs in virtual fish bodies, and raised the artificial fish in virtual fish tanks that mimicked the rearing conditions of real fish. We then compared the social preferences that emerged in real fish versus artificial fish. We found that when artificial fish had two core learning mechanisms (reinforcement learning and curiosity-driven learning), artificial fish developed fish-like social preferences. Like real fish, the artificial fish spontaneously learned to prefer members of their own group over members of other groups. The artificial fish also spontaneously learned to self-segregate with their in-group, akin to self-segregation behavior seen in nature. Our results suggest that social grouping can emerge from three ingredients: (1) reinforcement learning, (2) intrinsic motivation, and (3) early social experiences with in-group members. This approach lays a foundation for reverse engineering animal-like social behavior with image-computable models, bridging the divide between high-dimensional sensory inputs and social preferences.
Controlled-rearing studies of newborn chicks and deep neural networks
Dec 12, 2021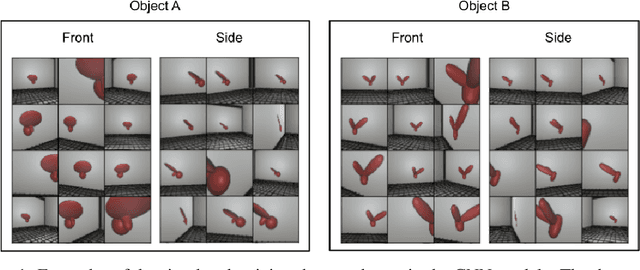
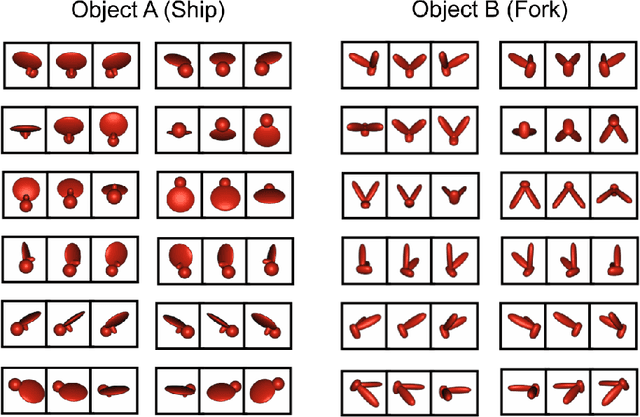
Convolutional neural networks (CNNs) can now achieve human-level performance on challenging object recognition tasks. CNNs are also the leading quantitative models in terms of predicting neural and behavioral responses in visual recognition tasks. However, there is a widely accepted critique of CNN models: unlike newborn animals, which learn rapidly and efficiently, CNNs are thought to be "data hungry," requiring massive amounts of training data to develop accurate models for object recognition. This critique challenges the promise of using CNNs as models of visual development. Here, we directly examined whether CNNs are more data hungry than newborn animals by performing parallel controlled-rearing experiments on newborn chicks and CNNs. We raised newborn chicks in strictly controlled visual environments, then simulated the training data available in that environment by constructing a virtual animal chamber in a video game engine. We recorded the visual images acquired by an agent moving through the virtual chamber and used those images to train CNNs. When CNNs received similar visual training data as chicks, the CNNs successfully solved the same challenging view-invariant object recognition tasks as the chicks. Thus, the CNNs were not more data hungry than animals: both CNNs and chicks successfully developed robust object models from training data of a single object.
Development of collective behavior in newborn artificial agents
Nov 06, 2021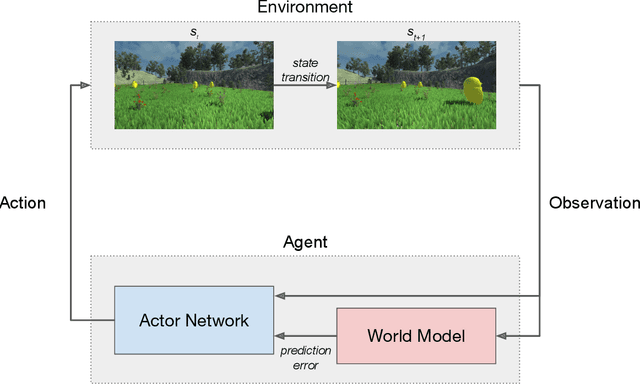
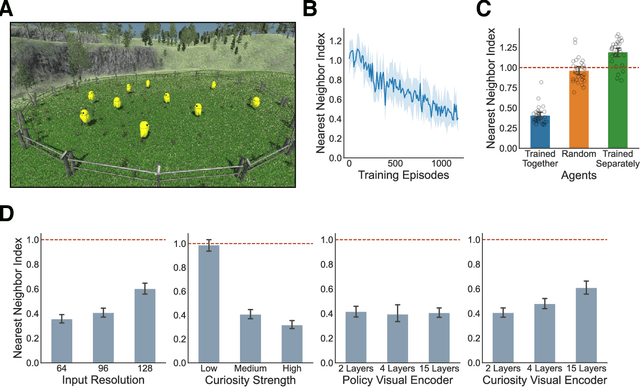
Collective behavior is widespread across the animal kingdom. To date, however, the developmental and mechanistic foundations of collective behavior have not been formally established. What learning mechanisms drive the development of collective behavior in newborn animals? Here, we used deep reinforcement learning and curiosity-driven learning -- two learning mechanisms deeply rooted in psychological and neuroscientific research -- to build newborn artificial agents that develop collective behavior. Like newborn animals, our agents learn collective behavior from raw sensory inputs in naturalistic environments. Our agents also learn collective behavior without external rewards, using only intrinsic motivation (curiosity) to drive learning. Specifically, when we raise our artificial agents in natural visual environments with groupmates, the agents spontaneously develop ego-motion, object recognition, and a preference for groupmates, rapidly learning all of the core skills required for collective behavior. This work bridges the divide between high-dimensional sensory inputs and collective action, resulting in a pixels-to-actions model of collective animal behavior. More generally, we show that two generic learning mechanisms -- deep reinforcement learning and curiosity-driven learning -- are sufficient to learn collective behavior from unsupervised natural experience.
Modeling Object Recognition in Newborn Chicks using Deep Neural Networks
Jun 14, 2021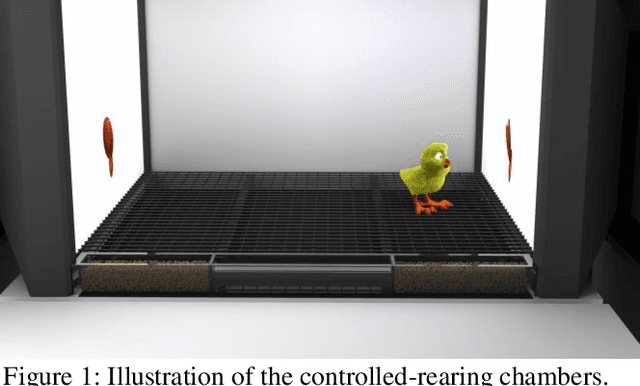
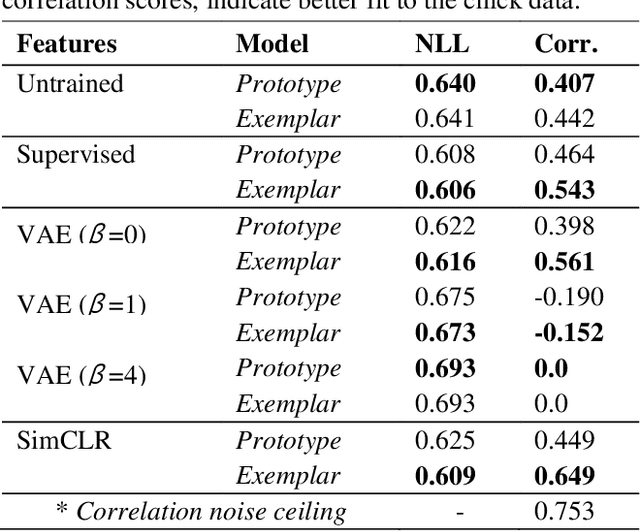
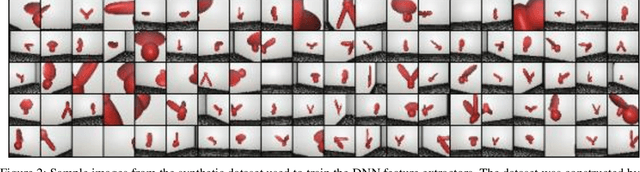
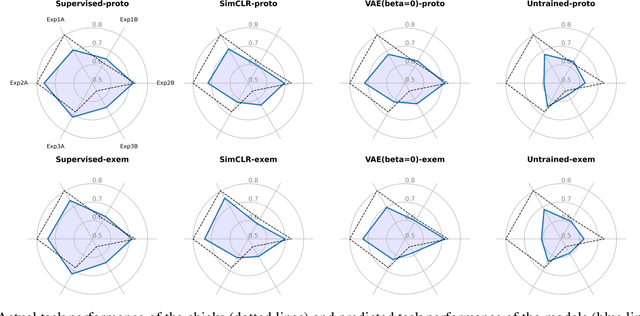
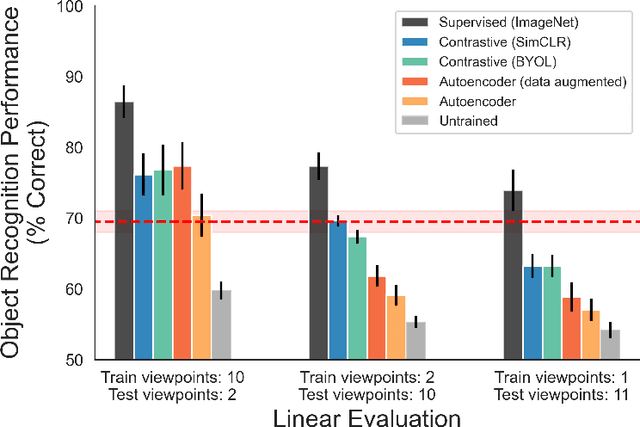
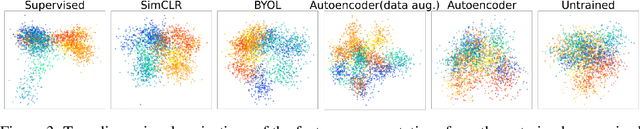
In recent years, the brain and cognitive sciences have made great strides developing a mechanistic understanding of object recognition in mature brains. Despite this progress, fundamental questions remain about the origins and computational foundations of object recognition. What learning algorithms underlie object recognition in newborn brains? Since newborn animals learn largely through unsupervised learning, we explored whether unsupervised learning algorithms can be used to predict the view-invariant object recognition behavior of newborn chicks. Specifically, we used feature representations derived from unsupervised deep neural networks (DNNs) as inputs to cognitive models of categorization. We show that features derived from unsupervised DNNs make competitive predictions about chick behavior compared to supervised features. More generally, we argue that linking controlled-rearing studies to image-computable DNN models opens new experimental avenues for studying the origins and computational basis of object recognition in newborn animals.
Joint Interaction and Trajectory Prediction for Autonomous Driving using Graph Neural Networks
Dec 17, 2019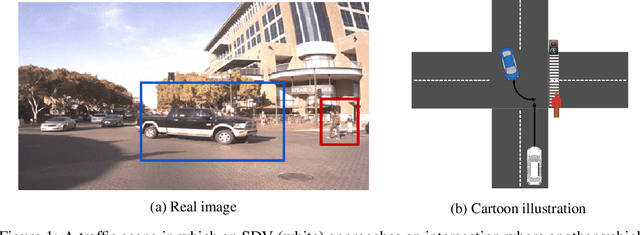
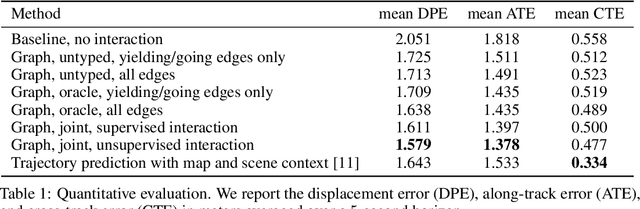
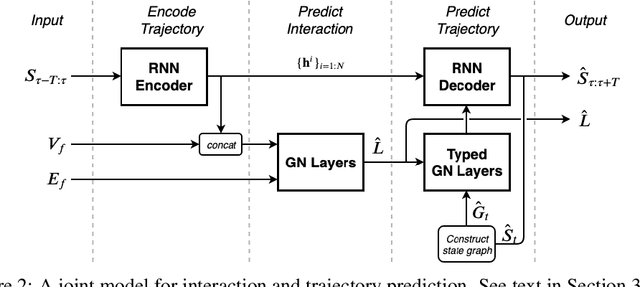
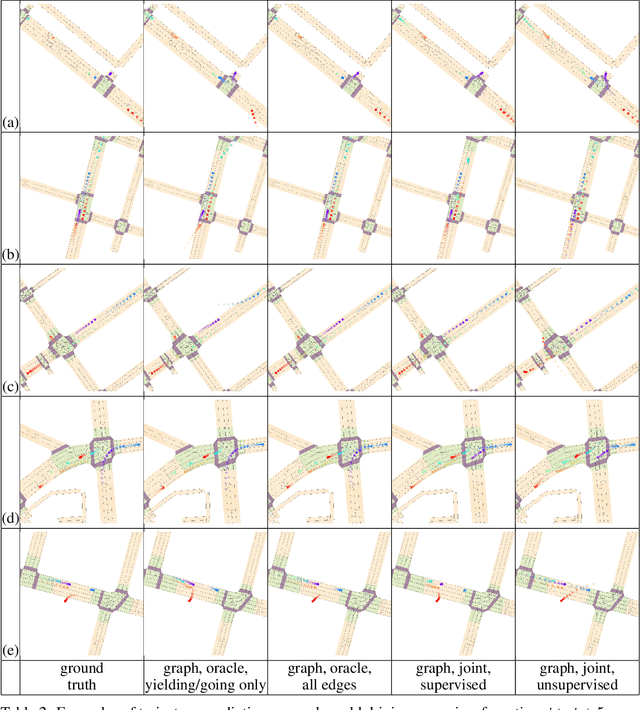
In this work, we aim to predict the future motion of vehicles in a traffic scene by explicitly modeling their pairwise interactions. Specifically, we propose a graph neural network that jointly predicts the discrete interaction modes and 5-second future trajectories for all agents in the scene. Our model infers an interaction graph whose nodes are agents and whose edges capture the long-term interaction intents among the agents. In order to train the model to recognize known modes of interaction, we introduce an auto-labeling function to generate ground truth interaction labels. Using a large-scale real-world driving dataset, we demonstrate that jointly predicting the trajectories along with the explicit interaction types leads to significantly lower trajectory error than baseline methods. Finally, we show through simulation studies that the learned interaction modes are semantically meaningful.