 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParallel development of social preferences in fish and machines
Paper and Code
May 18, 2023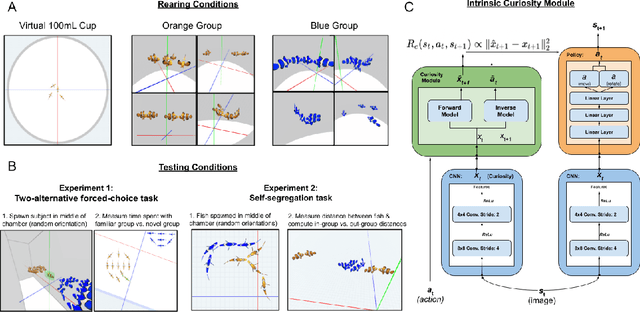
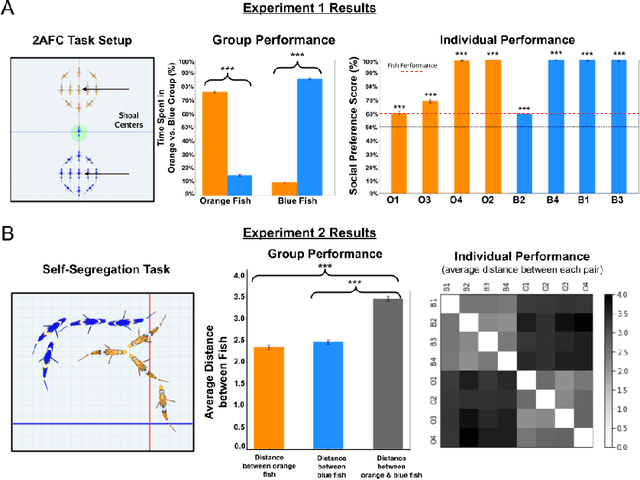
What are the computational foundations of social grouping? Traditional approaches to this question have focused on verbal reasoning or simple (low-dimensional) quantitative models. In the real world, however, social preferences emerge when high-dimensional learning systems (brains and bodies) interact with high-dimensional sensory inputs during an animal's embodied interactions with the world. A deep understanding of social grouping will therefore require embodied models that learn directly from sensory inputs using high-dimensional learning mechanisms. To this end, we built artificial neural networks (ANNs), embodied those ANNs in virtual fish bodies, and raised the artificial fish in virtual fish tanks that mimicked the rearing conditions of real fish. We then compared the social preferences that emerged in real fish versus artificial fish. We found that when artificial fish had two core learning mechanisms (reinforcement learning and curiosity-driven learning), artificial fish developed fish-like social preferences. Like real fish, the artificial fish spontaneously learned to prefer members of their own group over members of other groups. The artificial fish also spontaneously learned to self-segregate with their in-group, akin to self-segregation behavior seen in nature. Our results suggest that social grouping can emerge from three ingredients: (1) reinforcement learning, (2) intrinsic motivation, and (3) early social experiences with in-group members. This approach lays a foundation for reverse engineering animal-like social behavior with image-computable models, bridging the divide between high-dimensional sensory inputs and social preferences.