 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTopological mapping for traversability-aware long-range navigation in off-road terrain
Oct 02, 2024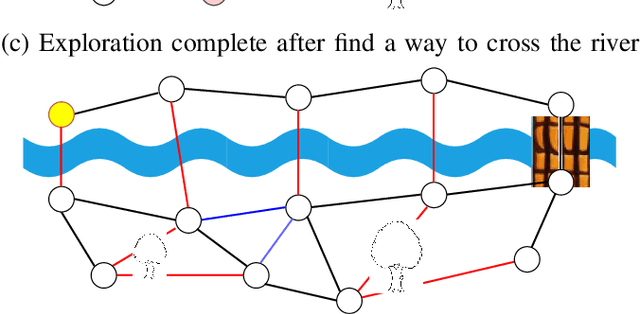

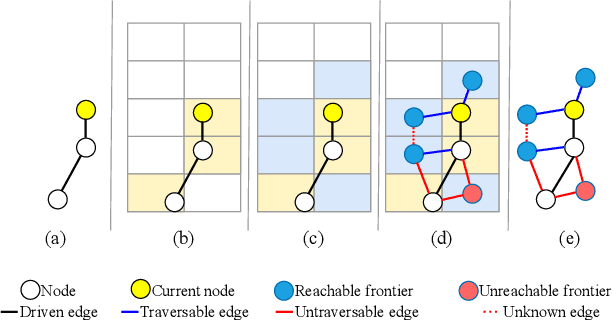
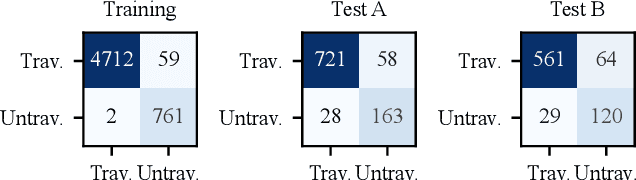
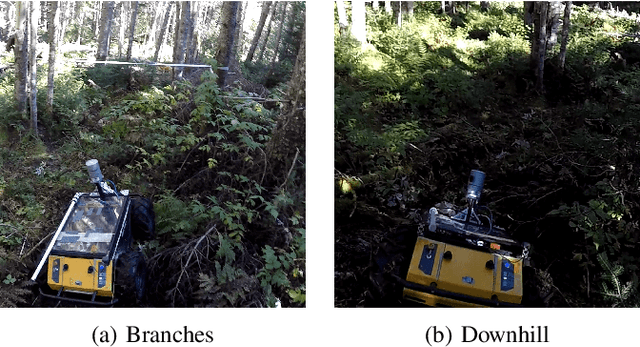
Autonomous robots navigating in off-road terrain like forests open new opportunities for automation. While off-road navigation has been studied, existing work often relies on clearly delineated pathways. We present a method allowing for long-range planning, exploration and low-level control in unknown off-trail forest terrain, using vision and GPS only. We represent outdoor terrain with a topological map, which is a set of panoramic snapshots connected with edges containing traversability information. A novel traversability analysis method is demonstrated, predicting the existence of a safe path towards a target in an image. Navigating between nodes is done using goal-conditioned behavior cloning, leveraging the power of a pretrained vision transformer. An exploration planner is presented, efficiently covering an unknown off-road area with unknown traversability using a frontiers-based approach. The approach is successfully deployed to autonomously explore two 400 meters squared forest sites unseen during training, in difficult conditions for navigation.
Learning active tactile perception through belief-space control
Nov 30, 2023Robots operating in an open world will encounter novel objects with unknown physical properties, such as mass, friction, or size. These robots will need to sense these properties through interaction prior to performing downstream tasks with the objects. We propose a method that autonomously learns tactile exploration policies by developing a generative world model that is leveraged to 1) estimate the object's physical parameters using a differentiable Bayesian filtering algorithm and 2) develop an exploration policy using an information-gathering model predictive controller. We evaluate our method on three simulated tasks where the goal is to estimate a desired object property (mass, height or toppling height) through physical interaction. We find that our method is able to discover policies that efficiently gather information about the desired property in an intuitive manner. Finally, we validate our method on a real robot system for the height estimation task, where our method is able to successfully learn and execute an information-gathering policy from scratch.
Multimodal dynamics modeling for off-road autonomous vehicles
Nov 23, 2020


Dynamics modeling in outdoor and unstructured environments is difficult because different elements in the environment interact with the robot in ways that can be hard to predict. Leveraging multiple sensors to perceive maximal information about the robot's environment is thus crucial when building a model to perform predictions about the robot's dynamics with the goal of doing motion planning. We design a model capable of long-horizon motion predictions, leveraging vision, lidar and proprioception, which is robust to arbitrarily missing modalities at test time. We demonstrate in simulation that our model is able to leverage vision to predict traction changes. We then test our model using a real-world challenging dataset of a robot navigating through a forest, performing predictions in trajectories unseen during training. We try different modality combinations at test time and show that, while our model performs best when all modalities are present, it is still able to perform better than the baseline even when receiving only raw vision input and no proprioception, as well as when only receiving proprioception. Overall, our study demonstrates the importance of leveraging multiple sensors when doing dynamics modeling in outdoor conditions.
Vision-Based Goal-Conditioned Policies for Underwater Navigation in the Presence of Obstacles
Jun 29, 2020
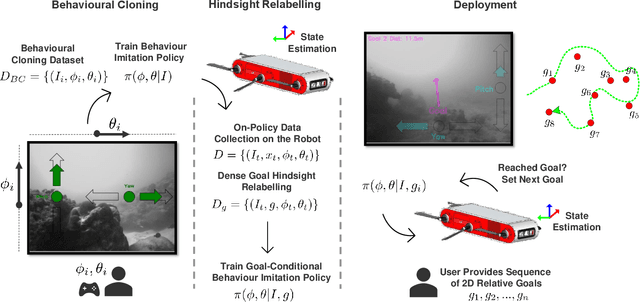
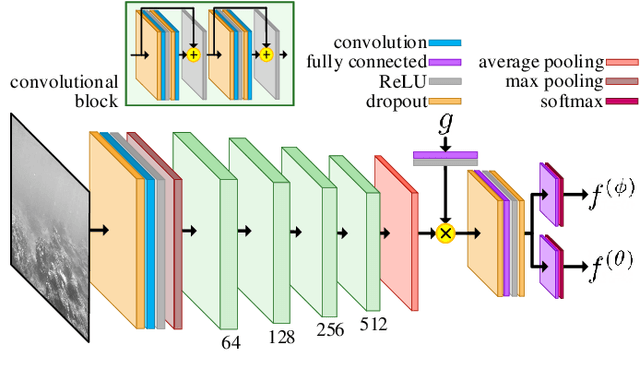
We present Nav2Goal, a data-efficient and end-to-end learning method for goal-conditioned visual navigation. Our technique is used to train a navigation policy that enables a robot to navigate close to sparse geographic waypoints provided by a user without any prior map, all while avoiding obstacles and choosing paths that cover user-informed regions of interest. Our approach is based on recent advances in conditional imitation learning. General-purpose, safe and informative actions are demonstrated by a human expert. The learned policy is subsequently extended to be goal-conditioned by training with hindsight relabelling, guided by the robot's relative localization system, which requires no additional manual annotation. We deployed our method on an underwater vehicle in the open ocean to collect scientifically relevant data of coral reefs, which allowed our robot to operate safely and autonomously, even at very close proximity to the coral. Our field deployments have demonstrated over a kilometer of autonomous visual navigation, where the robot reaches on the order of 40 waypoints, while collecting scientifically relevant data. This is done while travelling within 0.5 m altitude from sensitive corals and exhibiting significant learned agility to overcome turbulent ocean conditions and to actively avoid collisions.
Automatic 3D Mapping for Tree Diameter Measurements in Inventory Operations
Apr 10, 2019
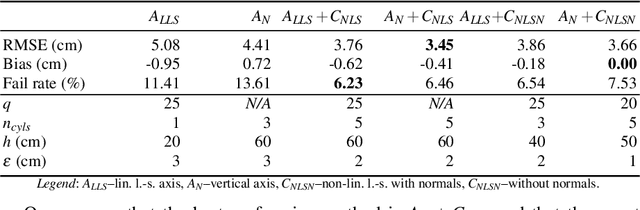


Forestry is a major industry in many parts of the world. It relies on forest inventory, which consists of measuring tree attributes. We propose to use 3D mapping, based on the iterative closest point algorithm, to automatically measure tree diameters in forests from mobile robot observations. While previous studies showed the potential for such technology, they lacked a rigorous analysis of diameter estimation methods in challenging forest environments. Here, we validated multiple diameter estimation methods, including two novel ones, in a new varied dataset of four different forest sites, 11 trajectories, totaling 1458 tree observations and 1.4 hectares. We provide recommendations for the deployment of mobile robots in a forestry context. We conclude that our mapping method is usable in the context of automated forest inventory, with our best method yielding a root mean square error of 3.45 cm for our whole dataset, and 2.04 cm in ideal conditions consisting of mature forest with well spaced trees.