 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTopological mapping for traversability-aware long-range navigation in off-road terrain
Paper and Code
Oct 02, 2024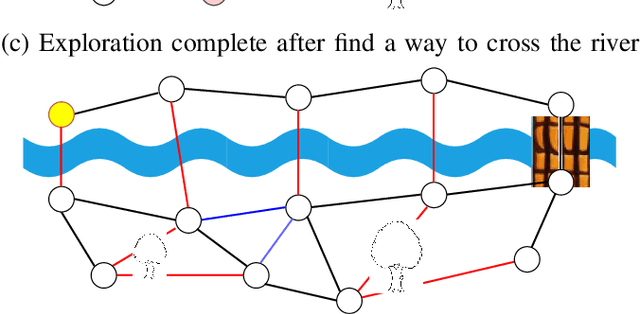

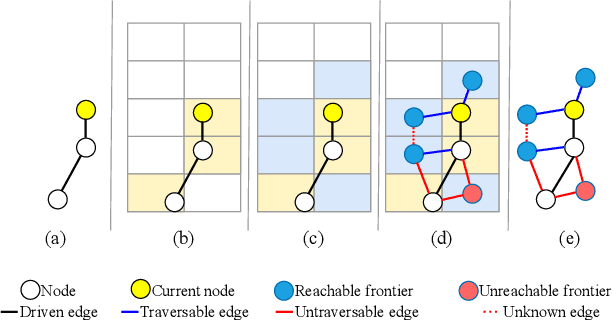
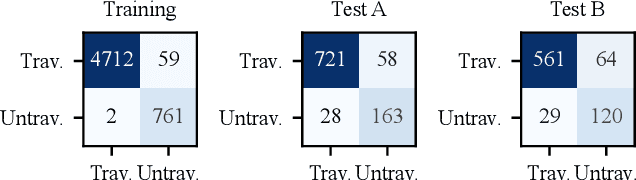
Autonomous robots navigating in off-road terrain like forests open new opportunities for automation. While off-road navigation has been studied, existing work often relies on clearly delineated pathways. We present a method allowing for long-range planning, exploration and low-level control in unknown off-trail forest terrain, using vision and GPS only. We represent outdoor terrain with a topological map, which is a set of panoramic snapshots connected with edges containing traversability information. A novel traversability analysis method is demonstrated, predicting the existence of a safe path towards a target in an image. Navigating between nodes is done using goal-conditioned behavior cloning, leveraging the power of a pretrained vision transformer. An exploration planner is presented, efficiently covering an unknown off-road area with unknown traversability using a frontiers-based approach. The approach is successfully deployed to autonomously explore two 400 meters squared forest sites unseen during training, in difficult conditions for navigation.