 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNo Need for "Learning" to Defer? A Training Free Deferral Framework to Multiple Experts through Conformal Prediction
Sep 16, 2025AI systems often fail to deliver reliable predictions across all inputs, prompting the need for hybrid human-AI decision-making. Existing Learning to Defer (L2D) approaches address this by training deferral models, but these are sensitive to changes in expert composition and require significant retraining if experts change. We propose a training-free, model- and expert-agnostic framework for expert deferral based on conformal prediction. Our method uses the prediction set generated by a conformal predictor to identify label-specific uncertainty and selects the most discriminative expert using a segregativity criterion, measuring how well an expert distinguishes between the remaining plausible labels. Experiments on CIFAR10-H and ImageNet16-H show that our method consistently outperforms both the standalone model and the strongest expert, with accuracies attaining $99.57\pm0.10\%$ and $99.40\pm0.52\%$, while reducing expert workload by up to a factor of $11$. The method remains robust under degraded expert performance and shows a gradual performance drop in low-information settings. These results suggest a scalable, retraining-free alternative to L2D for real-world human-AI collaboration.
ARENA: Adaptive Risk-aware and Energy-efficient NAvigation for Multi-Objective 3D Infrastructure Inspection with a UAV
Feb 26, 2025Autonomous robotic inspection missions require balancing multiple conflicting objectives while navigating near costly obstacles. Current multi-objective path planning (MOPP) methods struggle to adapt to evolving risks like localization errors, weather, battery state, and communication issues. This letter presents an Adaptive Risk-aware and Energy-efficient NAvigation (ARENA) MOPP approach for UAVs in complex 3D environments. Our method enables online trajectory adaptation by optimizing safety, time, and energy using 4D NURBS representation and a genetic-based algorithm to generate the Pareto front. A novel risk-aware voting algorithm ensures adaptivity. Simulations and real-world tests demonstrate the planner's ability to produce diverse, optimized trajectories covering 95% or more of the range defined by single-objective benchmarks and its ability to estimate power consumption with a mean error representing 14% of the full power range. The ARENA framework enhances UAV autonomy and reliability in critical, evolving 3D missions.
Topological mapping for traversability-aware long-range navigation in off-road terrain
Oct 02, 2024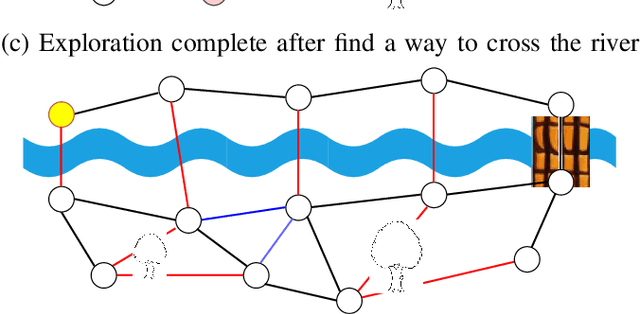

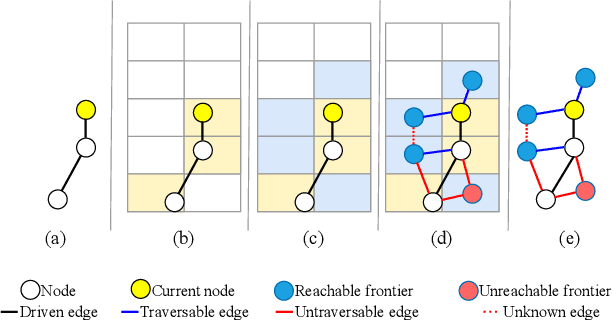
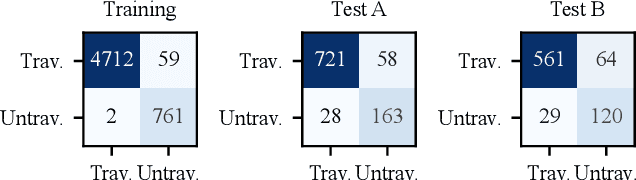
Autonomous robots navigating in off-road terrain like forests open new opportunities for automation. While off-road navigation has been studied, existing work often relies on clearly delineated pathways. We present a method allowing for long-range planning, exploration and low-level control in unknown off-trail forest terrain, using vision and GPS only. We represent outdoor terrain with a topological map, which is a set of panoramic snapshots connected with edges containing traversability information. A novel traversability analysis method is demonstrated, predicting the existence of a safe path towards a target in an image. Navigating between nodes is done using goal-conditioned behavior cloning, leveraging the power of a pretrained vision transformer. An exploration planner is presented, efficiently covering an unknown off-road area with unknown traversability using a frontiers-based approach. The approach is successfully deployed to autonomously explore two 400 meters squared forest sites unseen during training, in difficult conditions for navigation.
FLAGRED -- Fuzzy Logic-based Algorithm Generalizing Risk Estimation for Drones
Feb 07, 2024Accurately estimating risk in real-time is essential for ensuring the safety and efficiency of many applications involving autonomous robot systems. This paper presents a novel, generalizable algorithm for the real-time estimation of risks created by external disturbances on multirotors. Unlike conventional approaches, our method requires no additional sensors, accurate drone models, or large datasets. It employs motor command data in a fuzzy logic system, overcoming barriers to real-world implementation. Inherently adaptable, it utilizes fundamental drone characteristics, making it applicable to diverse drone models. The efficiency of the algorithm has been confirmed through comprehensive real-world testing on various platforms. It proficiently discerned between high and low-risk scenarios resulting from diverse wind disturbances and varying thrust-to-weight ratios. The algorithm surpassed the widely-recognized ArduCopter wind estimation algorithm in performance and demonstrated its capability to promptly detect brief gusts.