 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Objective Algorithms for Learning Open-Ended Robotic Problems
Nov 11, 2024
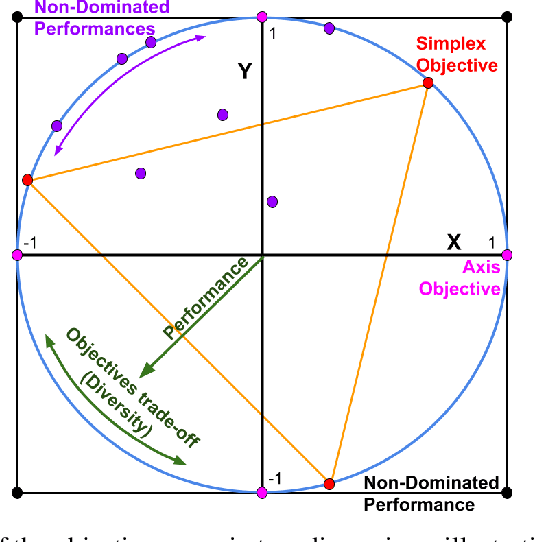
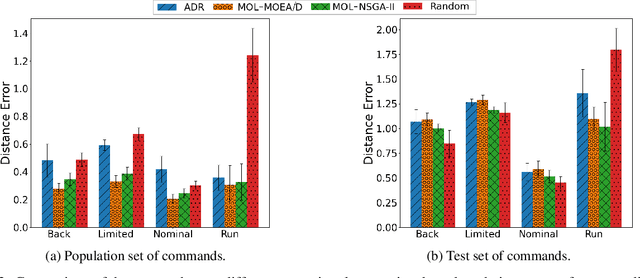
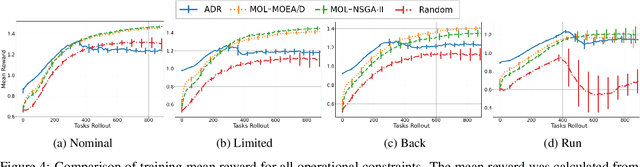
Quadrupedal locomotion is a complex, open-ended problem vital to expanding autonomous vehicle reach. Traditional reinforcement learning approaches often fall short due to training instability and sample inefficiency. We propose a novel method leveraging multi-objective evolutionary algorithms as an automatic curriculum learning mechanism, which we named Multi-Objective Learning (MOL). Our approach significantly enhances the learning process by projecting velocity commands into an objective space and optimizing for both performance and diversity. Tested within the MuJoCo physics simulator, our method demonstrates superior stability and adaptability compared to baseline approaches. As such, it achieved 19\% and 44\% fewer errors against our best baseline algorithm in difficult scenarios based on a uniform and tailored evaluation respectively. This work introduces a robust framework for training quadrupedal robots, promising significant advancements in robotic locomotion and open-ended robotic problems.
FLAGRED -- Fuzzy Logic-based Algorithm Generalizing Risk Estimation for Drones
Feb 07, 2024Accurately estimating risk in real-time is essential for ensuring the safety and efficiency of many applications involving autonomous robot systems. This paper presents a novel, generalizable algorithm for the real-time estimation of risks created by external disturbances on multirotors. Unlike conventional approaches, our method requires no additional sensors, accurate drone models, or large datasets. It employs motor command data in a fuzzy logic system, overcoming barriers to real-world implementation. Inherently adaptable, it utilizes fundamental drone characteristics, making it applicable to diverse drone models. The efficiency of the algorithm has been confirmed through comprehensive real-world testing on various platforms. It proficiently discerned between high and low-risk scenarios resulting from diverse wind disturbances and varying thrust-to-weight ratios. The algorithm surpassed the widely-recognized ArduCopter wind estimation algorithm in performance and demonstrated its capability to promptly detect brief gusts.