 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTheoretical Closed-loop Stability Bounds for Dynamical System Coupled with Diffusion Policies
Nov 19, 2025Diffusion Policy has shown great performance in robotic manipulation tasks under stochastic perturbations, due to its ability to model multimodal action distributions. Nonetheless, its reliance on a computationally expensive reverse-time diffusion (denoising) process, for action inference, makes it challenging to use for real-time applications where quick decision-making is mandatory. This work studies the possibility of conducting the denoising process only partially before executing an action, allowing the plant to evolve according to its dynamics in parallel to the reverse-time diffusion dynamics ongoing on the computer. In a classical diffusion policy setting, the plant dynamics are usually slow and the two dynamical processes are uncoupled. Here, we investigate theoretical bounds on the stability of closed-loop systems using diffusion policies when the plant dynamics and the denoising dynamics are coupled. The contribution of this work gives a framework for faster imitation learning and a metric that yields if a controller will be stable based on the variance of the demonstrations.
ARENA: Adaptive Risk-aware and Energy-efficient NAvigation for Multi-Objective 3D Infrastructure Inspection with a UAV
Feb 26, 2025Autonomous robotic inspection missions require balancing multiple conflicting objectives while navigating near costly obstacles. Current multi-objective path planning (MOPP) methods struggle to adapt to evolving risks like localization errors, weather, battery state, and communication issues. This letter presents an Adaptive Risk-aware and Energy-efficient NAvigation (ARENA) MOPP approach for UAVs in complex 3D environments. Our method enables online trajectory adaptation by optimizing safety, time, and energy using 4D NURBS representation and a genetic-based algorithm to generate the Pareto front. A novel risk-aware voting algorithm ensures adaptivity. Simulations and real-world tests demonstrate the planner's ability to produce diverse, optimized trajectories covering 95% or more of the range defined by single-objective benchmarks and its ability to estimate power consumption with a mean error representing 14% of the full power range. The ARENA framework enhances UAV autonomy and reliability in critical, evolving 3D missions.
Relative ultra-wideband based localization of multi-robot systems with kinematic extended Kalman filter
Mar 20, 2023Localization plays a critical role in the field of distributed swarm robotics. Previous work has highlighted the potential of relative localization for position tracking in multi-robot systems. Ultra-wideband (UWB) technology provides a good estimation of the relative position between robots but suffers from some limitations. This paper proposes improving the relative localization functionality developed in our previous work, which is based on UWB technology. Our new approach merges UWB telemetry and kinematic model into an extended Kalman filter to properly track the relative position of robots. We performed a simulation and validated the improvements in relative distance and angle accuracy for the proposed approach. An additional analysis was conducted to observe the increase in performance when the robots share their control inputs.
Ego-noise reduction of a mobile robot using noise spatial covariance matrix learning and minimum variance distortionless response
Mar 07, 2023


The performance of speech and events recognition systems significantly improved recently thanks to deep learning methods. However, some of these tasks remain challenging when algorithms are deployed on robots due to the unseen mechanical noise and electrical interference generated by their actuators while training the neural networks. Ego-noise reduction as a preprocessing step therefore can help solve this issue when using pre-trained speech and event recognition algorithms on robots. In this paper, we propose a new method to reduce ego-noise using only a microphone array and less than two minute of noise recordings. Using Principal Component Analysis (PCA), the best covariance matrix candidate is selected from a dictionary created online during calibration and used with the Minimum Variance Distortionless Response (MVDR) beamformer. Results show that the proposed method runs in real-time, improves the signal-to-distortion ratio (SDR) by up to 10 dB, decreases the word error rate (WER) by 55\% in some cases and increases the Average Precision (AP) of event detection by up to 0.2.
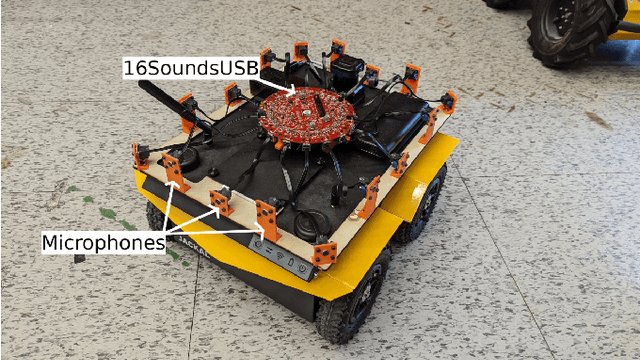
SwarmUS: An open hardware and software on-board platform for swarm robotics development
Mar 05, 2022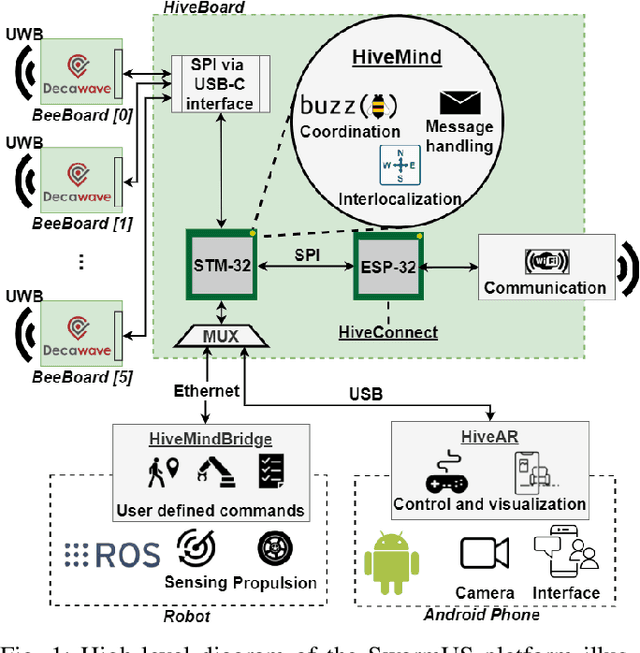
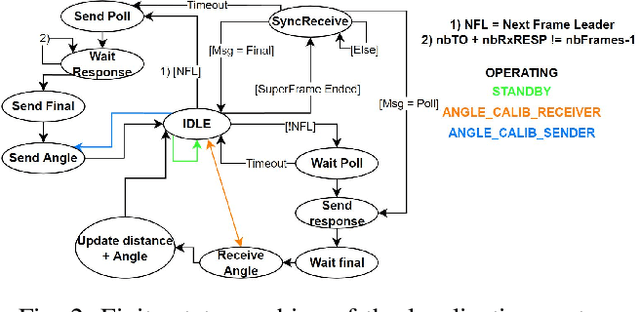
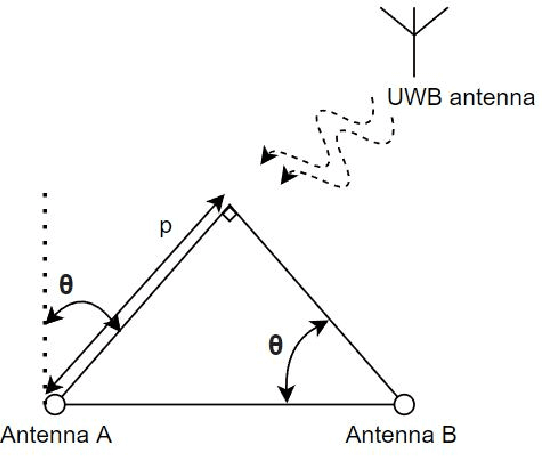
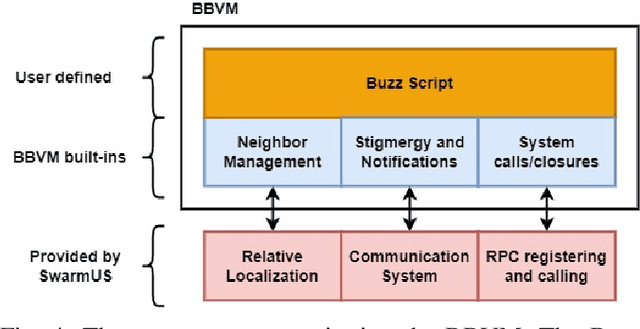
Real life implementations of distributed swarm robotics are rare. The standardization of a general purpose swarm robotics platform could greatly accelerate swarm robotics towards real life implementations. The SwarmUS platform is an open-source hardware and software on-board embedded system designed to be added onto existing robots while providing them with swarm features, thus proposing a new take on the platform standardization problem. These features include a distributed relative localization system based on Ultra-Wideband, a local communication system based on Wi-Fi and a distributed coordination system based on the Buzz programming language between robots connected within a SwarmUS platform. Additionally, a human-swarm interaction mobile application and an emulation of the platform in the Robot Operating System (ROS) is presented. Finally, an implementation of the system was realized and tested on two types of robots : a TurtleBot3 Burger and two Pioneer 2DX.
OpenTera: A Microservice Architecture Solution for Rapid Prototyping of Robotic Solutions to COVID-19 Challenges in Care Facilities
Mar 10, 2021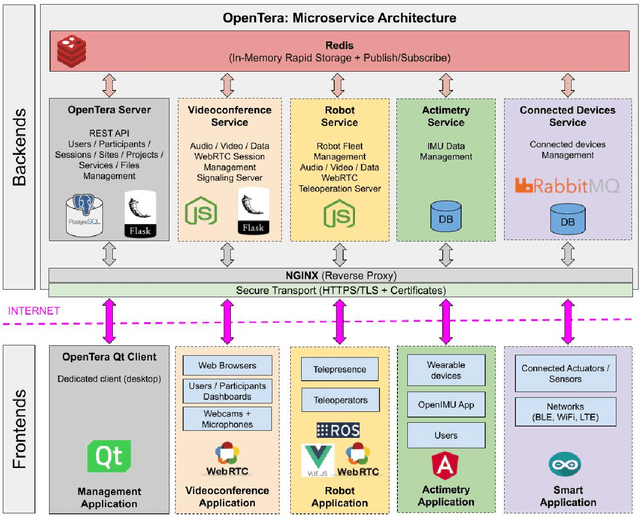
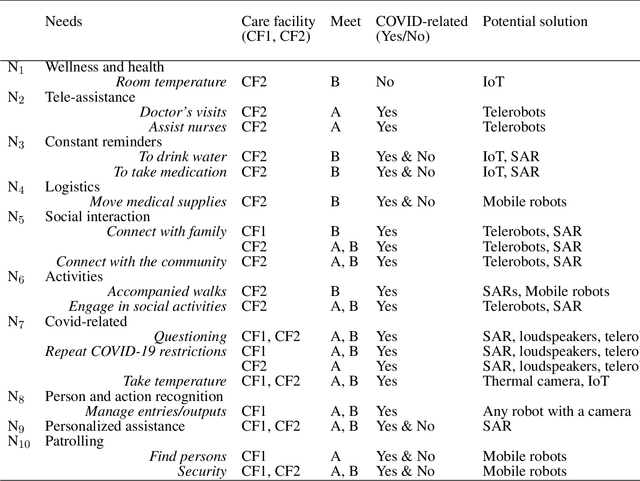
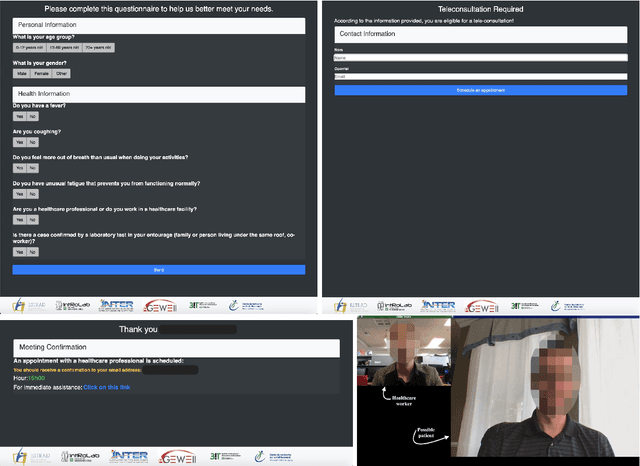
As telecommunications technology progresses, telehealth frameworks are becoming more widely adopted in the context of long-term care (LTC) for older adults, both in care facilities and in homes. Today, robots could assist healthcare workers when they provide care to elderly patients, who constitute a particularly vulnerable population during the COVID-19 pandemic. Previous work on user-centered design of assistive technologies in LTC facilities for seniors has identified positive impacts. The need to deal with the effects of the COVID-19 pandemic emphasizes the benefits of this approach, but also highlights some new challenges for which robots could be interesting solutions to be deployed in LTC facilities. This requires customization of telecommunication and audio/video/data processing to address specific clinical requirements and needs. This paper presents OpenTera, an open source telehealth framework, aiming to facilitate prototyping of such solutions by software and robotic designers. Designed as a microservice-oriented platform, OpenTera is an end-to-end solution that employs a series of independent modules for tasks such as data and session management, telehealth, daily assistive tasks/actions, together with smart devices and environments, all connected through the framework. After explaining the framework, we illustrate how OpenTera can be used to implement robotic solutions for different applications identified in LTC facilities and homes, and we describe how we plan to validate them through field trials.