 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenTera: A Microservice Architecture Solution for Rapid Prototyping of Robotic Solutions to COVID-19 Challenges in Care Facilities
Mar 10, 2021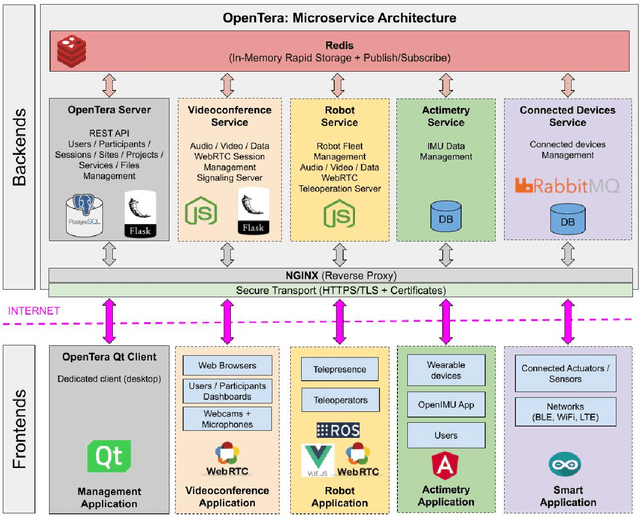
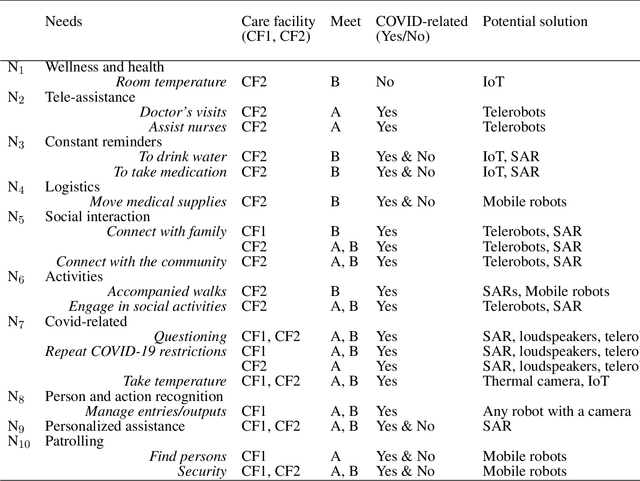
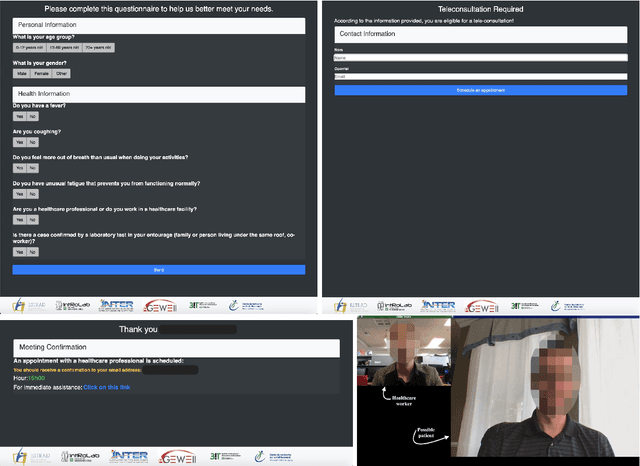
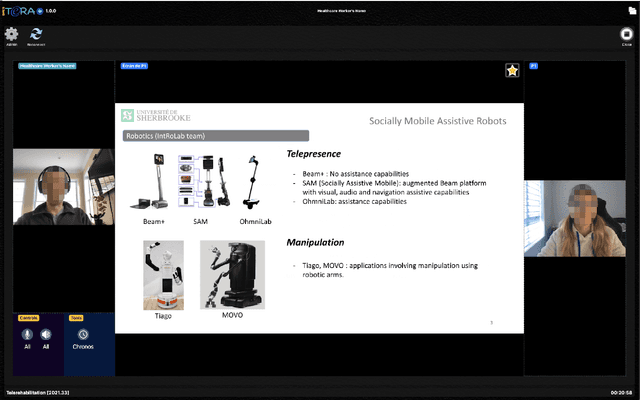
As telecommunications technology progresses, telehealth frameworks are becoming more widely adopted in the context of long-term care (LTC) for older adults, both in care facilities and in homes. Today, robots could assist healthcare workers when they provide care to elderly patients, who constitute a particularly vulnerable population during the COVID-19 pandemic. Previous work on user-centered design of assistive technologies in LTC facilities for seniors has identified positive impacts. The need to deal with the effects of the COVID-19 pandemic emphasizes the benefits of this approach, but also highlights some new challenges for which robots could be interesting solutions to be deployed in LTC facilities. This requires customization of telecommunication and audio/video/data processing to address specific clinical requirements and needs. This paper presents OpenTera, an open source telehealth framework, aiming to facilitate prototyping of such solutions by software and robotic designers. Designed as a microservice-oriented platform, OpenTera is an end-to-end solution that employs a series of independent modules for tasks such as data and session management, telehealth, daily assistive tasks/actions, together with smart devices and environments, all connected through the framework. After explaining the framework, we illustrate how OpenTera can be used to implement robotic solutions for different applications identified in LTC facilities and homes, and we describe how we plan to validate them through field trials.
ODAS: Open embeddeD Audition System
Mar 05, 2021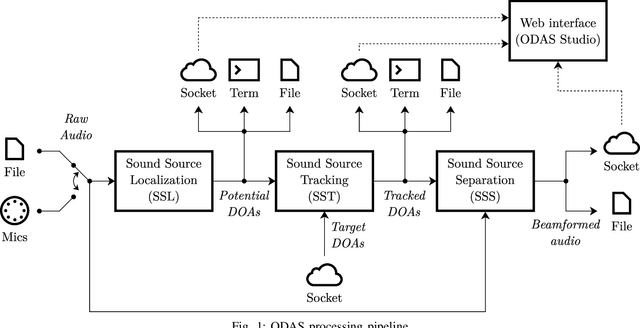
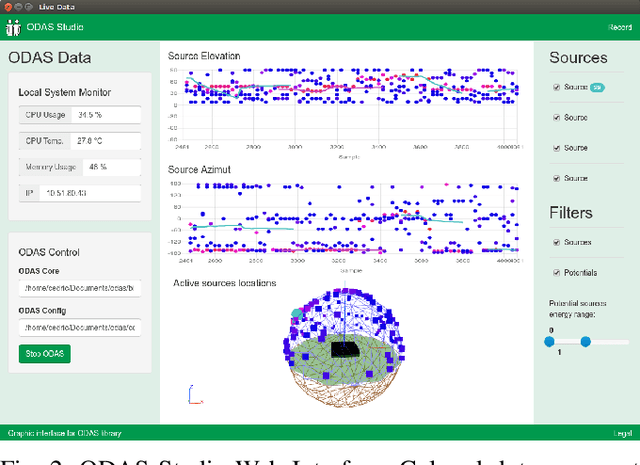
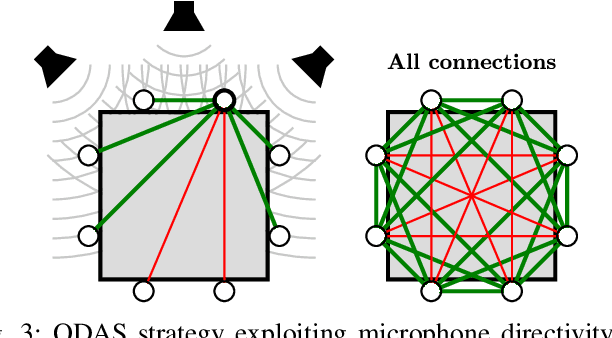
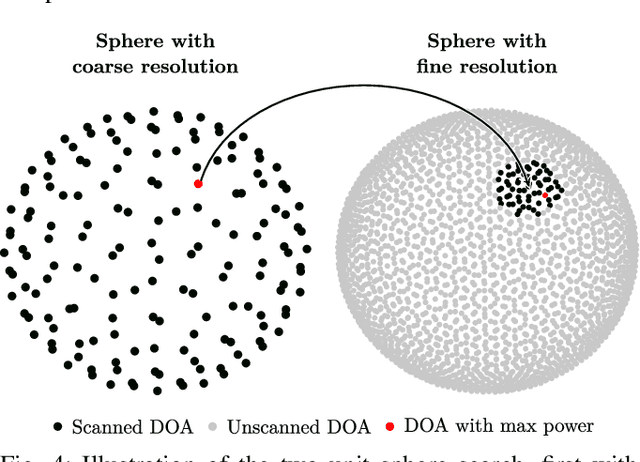
Artificial audition aims at providing hearing capabilities to machines, computers and robots. Existing frameworks in robot audition offer interesting sound source localization, tracking and separation performance, but involve a significant amount of computations that limit their use on robots with embedded computing capabilities. This paper presents ODAS, the Open embeddeD Audition System framework, which includes strategies to reduce the computational load and perform robot audition tasks on low-cost embedded computing systems. It presents key features of ODAS, along with cases illustrating its uses in different robots and artificial audition applications.
Robust Sound Source Localization Using a Microphone Array on a Mobile Robot
Feb 26, 2016



The hearing sense on a mobile robot is important because it is omnidirectional and it does not require direct line-of-sight with the sound source. Such capabilities can nicely complement vision to help localize a person or an interesting event in the environment. To do so the robot auditory system must be able to work in noisy, unknown and diverse environmental conditions. In this paper we present a robust sound source localization method in three-dimensional space using an array of 8 microphones. The method is based on time delay of arrival estimation. Results show that a mobile robot can localize in real time different types of sound sources over a range of 3 meters and with a precision of 3 degrees.
* 6 pages