 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRelative ultra-wideband based localization of multi-robot systems with kinematic extended Kalman filter
Mar 20, 2023Localization plays a critical role in the field of distributed swarm robotics. Previous work has highlighted the potential of relative localization for position tracking in multi-robot systems. Ultra-wideband (UWB) technology provides a good estimation of the relative position between robots but suffers from some limitations. This paper proposes improving the relative localization functionality developed in our previous work, which is based on UWB technology. Our new approach merges UWB telemetry and kinematic model into an extended Kalman filter to properly track the relative position of robots. We performed a simulation and validated the improvements in relative distance and angle accuracy for the proposed approach. An additional analysis was conducted to observe the increase in performance when the robots share their control inputs.
SwarmUS: An open hardware and software on-board platform for swarm robotics development
Mar 05, 2022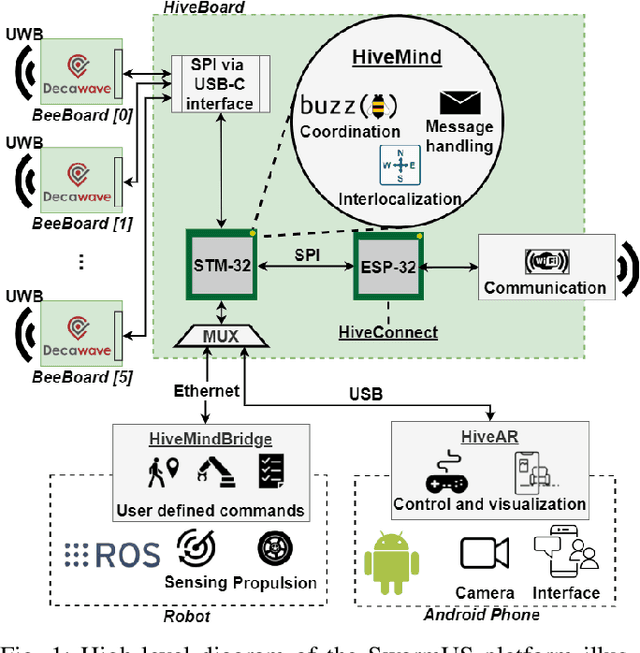
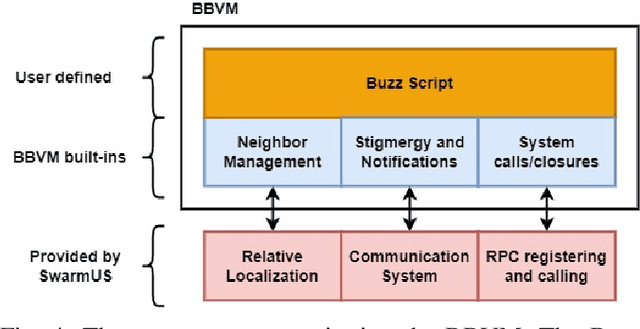
Real life implementations of distributed swarm robotics are rare. The standardization of a general purpose swarm robotics platform could greatly accelerate swarm robotics towards real life implementations. The SwarmUS platform is an open-source hardware and software on-board embedded system designed to be added onto existing robots while providing them with swarm features, thus proposing a new take on the platform standardization problem. These features include a distributed relative localization system based on Ultra-Wideband, a local communication system based on Wi-Fi and a distributed coordination system based on the Buzz programming language between robots connected within a SwarmUS platform. Additionally, a human-swarm interaction mobile application and an emulation of the platform in the Robot Operating System (ROS) is presented. Finally, an implementation of the system was realized and tested on two types of robots : a TurtleBot3 Burger and two Pioneer 2DX.