 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3DGUT: Enabling Distorted Cameras and Secondary Rays in Gaussian Splatting
Dec 17, 2024
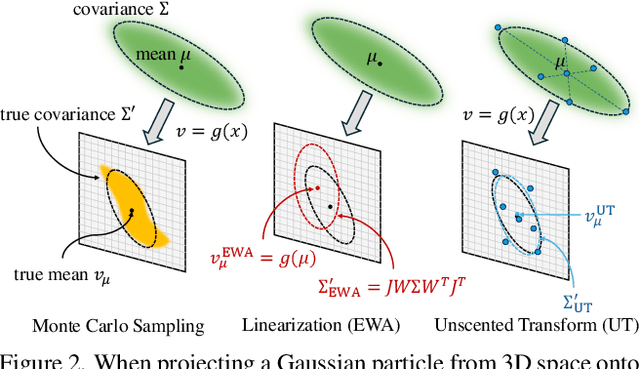


3D Gaussian Splatting (3DGS) has shown great potential for efficient reconstruction and high-fidelity real-time rendering of complex scenes on consumer hardware. However, due to its rasterization-based formulation, 3DGS is constrained to ideal pinhole cameras and lacks support for secondary lighting effects. Recent methods address these limitations by tracing volumetric particles instead, however, this comes at the cost of significantly slower rendering speeds. In this work, we propose 3D Gaussian Unscented Transform (3DGUT), replacing the EWA splatting formulation in 3DGS with the Unscented Transform that approximates the particles through sigma points, which can be projected exactly under any nonlinear projection function. This modification enables trivial support of distorted cameras with time dependent effects such as rolling shutter, while retaining the efficiency of rasterization. Additionally, we align our rendering formulation with that of tracing-based methods, enabling secondary ray tracing required to represent phenomena such as reflections and refraction within the same 3D representation.
OmniRe: Omni Urban Scene Reconstruction
Aug 29, 2024We introduce OmniRe, a holistic approach for efficiently reconstructing high-fidelity dynamic urban scenes from on-device logs. Recent methods for modeling driving sequences using neural radiance fields or Gaussian Splatting have demonstrated the potential of reconstructing challenging dynamic scenes, but often overlook pedestrians and other non-vehicle dynamic actors, hindering a complete pipeline for dynamic urban scene reconstruction. To that end, we propose a comprehensive 3DGS framework for driving scenes, named OmniRe, that allows for accurate, full-length reconstruction of diverse dynamic objects in a driving log. OmniRe builds dynamic neural scene graphs based on Gaussian representations and constructs multiple local canonical spaces that model various dynamic actors, including vehicles, pedestrians, and cyclists, among many others. This capability is unmatched by existing methods. OmniRe allows us to holistically reconstruct different objects present in the scene, subsequently enabling the simulation of reconstructed scenarios with all actors participating in real-time (~60Hz). Extensive evaluations on the Waymo dataset show that our approach outperforms prior state-of-the-art methods quantitatively and qualitatively by a large margin. We believe our work fills a critical gap in driving reconstruction.
3D Gaussian Ray Tracing: Fast Tracing of Particle Scenes
Jul 10, 2024



Particle-based representations of radiance fields such as 3D Gaussian Splatting have found great success for reconstructing and re-rendering of complex scenes. Most existing methods render particles via rasterization, projecting them to screen space tiles for processing in a sorted order. This work instead considers ray tracing the particles, building a bounding volume hierarchy and casting a ray for each pixel using high-performance GPU ray tracing hardware. To efficiently handle large numbers of semi-transparent particles, we describe a specialized rendering algorithm which encapsulates particles with bounding meshes to leverage fast ray-triangle intersections, and shades batches of intersections in depth-order. The benefits of ray tracing are well-known in computer graphics: processing incoherent rays for secondary lighting effects such as shadows and reflections, rendering from highly-distorted cameras common in robotics, stochastically sampling rays, and more. With our renderer, this flexibility comes at little cost compared to rasterization. Experiments demonstrate the speed and accuracy of our approach, as well as several applications in computer graphics and vision. We further propose related improvements to the basic Gaussian representation, including a simple use of generalized kernel functions which significantly reduces particle hit counts.