 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObservability and Consistency Analysis for Visual-Inertial Navigation with Anchored Feature Parameterizations
Jun 17, 2026This paper presents an analysis of the observability and consistency properties of filtering-based visual-inertial navigation systems (VINS) that utilize anchored feature representations. The unobservable subspace of VINS with anchored landmark parameterizations is shown to be independent of the estimated landmark state, which leads to improved estimator consistency properties without any additional modifications. However, the unobservable subspace is still found to depend on the estimated navigation state, necessitating additional consistency-enforcing techniques. Two methods to improve the consistency of VINS with anchored feature representations are presented. Simulation results showcase that all estimators employing anchored feature paramterizations exhibit improved consistency properties compared to algorithms that estimate features resolved in a global reference frame, especially in scenarios where feature initialization may be poor. Real-world experiments on the TUM-VI dataset showcase that the use of anchored feature representations alone can yield comparable performance to consistency-improved estimators employing a global feature representation, demonstrating the benefit of using anchored feature parameterizations for VINS.
An SE(3) Noise Model for Range-Azimuth-Elevation Sensors
Apr 26, 2025Scan matching is a widely used technique in state estimation. Point-cloud alignment, one of the most popular methods for scan matching, is a weighted least-squares problem in which the weights are determined from the inverse covariance of the measured points. An inaccurate representation of the covariance will affect the weighting of the least-squares problem. For example, if ellipsoidal covariance bounds are used to approximate the curved, "banana-shaped" noise characteristics of many scanning sensors, the weighting in the least-squares problem may be overconfident. Additionally, sensor-to-vehicle extrinsic uncertainty and odometry uncertainty during submap formation are two sources of uncertainty that are often overlooked in scan matching applications, also likely contributing to overconfidence on the scan matching estimate. This paper attempts to address these issues by developing a model for range-azimuth-elevation sensors on matrix Lie groups. The model allows for the seamless incorporation of extrinsic and odometry uncertainty. Illustrative results are shown both for a simulated example and for a real point-cloud submap collected with an underwater laser scanner.
MILUV: A Multi-UAV Indoor Localization dataset with UWB and Vision
Apr 19, 2025This paper introduces MILUV, a Multi-UAV Indoor Localization dataset with UWB and Vision measurements. This dataset comprises 217 minutes of flight time over 36 experiments using three quadcopters, collecting ultra-wideband (UWB) ranging data such as the raw timestamps and channel-impulse response data, vision data from a stereo camera and a bottom-facing monocular camera, inertial measurement unit data, height measurements from a laser rangefinder, magnetometer data, and ground-truth poses from a motion-capture system. The UWB data is collected from up to 12 transceivers affixed to mobile robots and static tripods in both line-of-sight and non-line-of-sight conditions. The UAVs fly at a maximum speed of 4.418 m/s in an indoor environment with visual fiducial markers as features. MILUV is versatile and can be used for a wide range of applications beyond localization, but the primary purpose of MILUV is for testing and validating multi-robot UWB- and vision-based localization algorithms. The dataset can be downloaded at https://doi.org/10.25452/figshare.plus.28386041.v1. A development kit is presented alongside the MILUV dataset, which includes benchmarking algorithms such as visual-inertial odometry, UWB-based localization using an extended Kalman filter, and classification of CIR data using machine learning approaches. The development kit can be found at https://github.com/decargroup/miluv, and is supplemented with a website available at https://decargroup.github.io/miluv/.
Globally Optimal Data-Association-Free Landmark-Based Localization Using Semidefinite Relaxations
Apr 11, 2025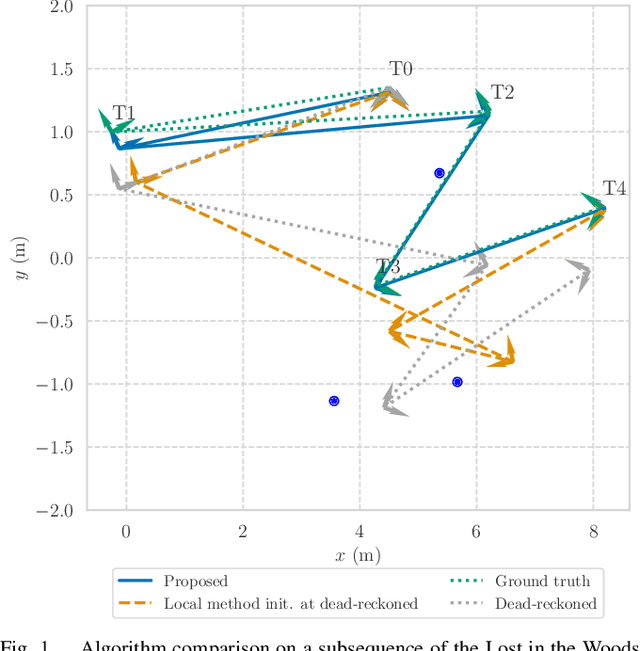
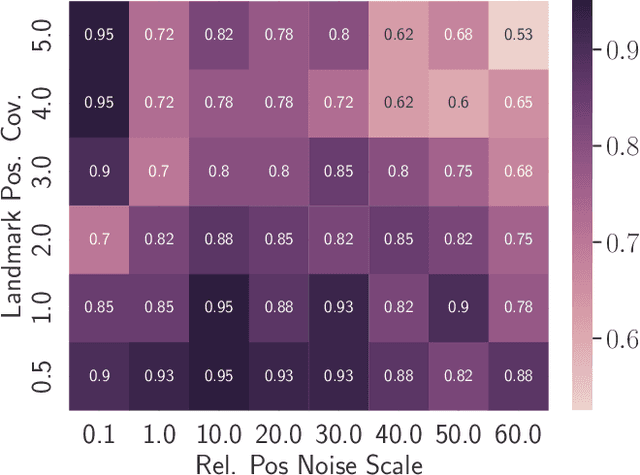
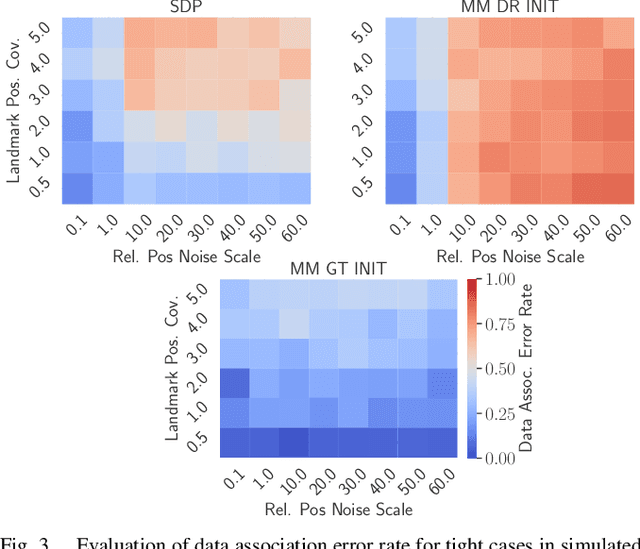
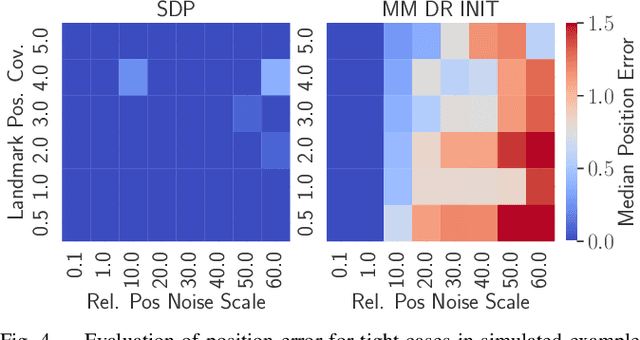
This paper proposes a semidefinite relaxation for landmark-based localization with unknown data associations in planar environments. The proposed method simultaneously solves for the optimal robot states and data associations in a globally optimal fashion. Relative position measurements to known landmarks are used, but the data association is unknown in tha tthe robot does not know which landmark each measurement is generated from. The relaxation is shown to be tight in a majority of cases for moderate noise levels. The proposed algorithm is compared to local Gauss-Newton baselines initialized at the dead-reckoned trajectory, and is shown to significantly improve convergence to the problem's global optimum in simulation and experiment. Accompanying software and supplementary material may be found at https://github.com/vkorotkine/certifiable_uda_loc .
Uncertainty Modelling and Robust Observer Synthesis using the Koopman Operator
Oct 01, 2024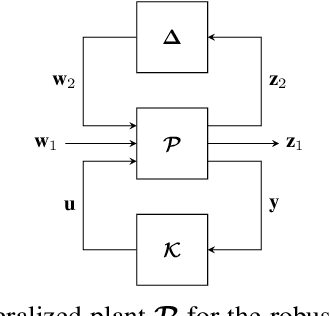
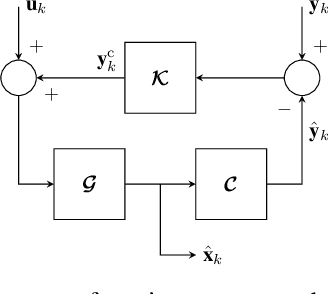

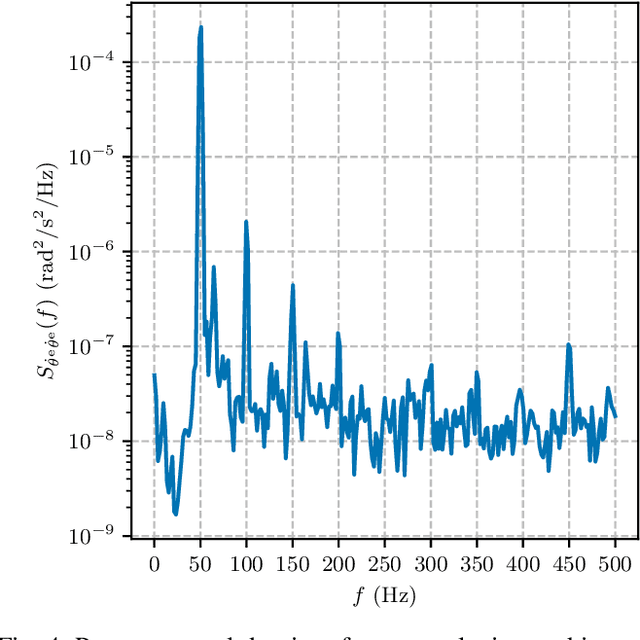
This paper proposes a robust nonlinear observer synthesis method for a population of systems modelled using the Koopman operator. The Koopman operator allows nonlinear systems to be rewritten as infinite-dimensional linear systems. A finite-dimensional approximation of the Koopman operator can be identified directly from data, yielding an approximately linear model of a nonlinear system. The proposed observer synthesis method is made possible by this linearity that in turn allows uncertainty within a population of Koopman models to be quantified in the frequency domain. Using this uncertainty model, linear robust control techniques are used to synthesize robust nonlinear Koopman observers. A population of several dozen motor drives is used to experimentally demonstrate the proposed method. Manufacturing variation is characterized in the frequency domain, and a robust Koopman observer is synthesized using mixed $\mathcal{H}_2$-$\mathcal{H}_\infty$ optimal control.
The Harmonic Exponential Filter for Nonparametric Estimation on Motion Groups
Aug 01, 2024



Bayesian estimation is a vital tool in robotics as it allows systems to update the belief of the robot state using incomplete information from noisy sensors. To render the state estimation problem tractable, many systems assume that the motion and measurement noise, as well as the state distribution, are all unimodal and Gaussian. However, there are numerous scenarios and systems that do not comply with these assumptions. Existing non-parametric filters that are used to model multimodal distributions have drawbacks that limit their ability to represent a diverse set of distributions. In this paper, we introduce a novel approach to nonparametric Bayesian filtering to cope with multimodal distributions using harmonic exponential distributions. This approach leverages two key insights of harmonic exponential distributions: a) the product of two distributions can be expressed as the element-wise addition of their log-likelihood Fourier coefficients, and b) the convolution of two distributions can be efficiently computed as the tensor product of their Fourier coefficients. These observations enable the development of an efficient and exact solution to the Bayes filter up to the band limit of a Fourier transform. We demonstrate our filter's superior performance compared with established nonparametric filtering methods across a range of simulated and real-world localization tasks.
A Hessian for Gaussian Mixture Likelihoods in Nonlinear Least Squares
Apr 08, 2024



This paper proposes a novel Hessian approximation for Maximum a Posteriori estimation problems in robotics involving Gaussian mixture likelihoods. The proposed Hessian leads to better convergence properties. Previous approaches manipulate the Gaussian mixture likelihood into a form that allows the problem to be represented as a nonlinear least squares (NLS) problem. However, they result in an inaccurate Hessian approximation due to additional nonlinearities that are not accounted for in NLS solvers. The proposed Hessian approximation is derived by setting the Hessians of the Gaussian mixture component errors to zero, which is the same starting point as for the Gauss-Newton Hessian approximation for NLS, and using the chain rule to account for additional nonlinearities. The proposed Hessian approximation is more accurate, resulting in improved convergence properties that are demonstrated on simulated and real-world experiments. A method to maintain compatibility with existing solvers, such as ceres, is also presented. Accompanying software and supplementary material can be found at https://github.com/decargroup/hessian_sum_mixtures.
Laser-to-Vehicle Extrinsic Calibration in Low-Observability Scenarios for Subsea Mapping
Mar 09, 2024Laser line scanners are increasingly being used in the subsea industry for high-resolution mapping and infrastructure inspection. However, calibrating the 3D pose of the scanner relative to the vehicle is a perennial source of confusion and frustration for industrial surveyors. This work describes three novel algorithms for laser-to-vehicle extrinsic calibration using naturally occurring features. Each algorithm makes a different assumption on the quality of the vehicle trajectory estimate, enabling good calibration results in a wide range of situations. A regularization technique is used to address low-observability scenarios frequently encountered in practice with large, rotationally stable subsea vehicles. Experimental results are provided for two field datasets, including the recently discovered wreck of the Endurance.
Optimal Robot Formations: Balancing Range-Based Observability and User-Defined Configurations
Mar 01, 2024This paper introduces a set of customizable and novel cost functions that enable the user to easily specify desirable robot formations, such as a ``high-coverage'' infrastructure-inspection formation, while maintaining high relative pose estimation accuracy. The overall cost function balances the need for the robots to be close together for good ranging-based relative localization accuracy and the need for the robots to achieve specific tasks, such as minimizing the time taken to inspect a given area. The formations found by minimizing the aggregated cost function are evaluated in a coverage path planning task in simulation and experiment, where the robots localize themselves and unknown landmarks using a simultaneous localization and mapping algorithm based on the extended Kalman filter. Compared to an optimal formation that maximizes ranging-based relative localization accuracy, these formations significantly reduce the time to cover a given area with minimal impact on relative pose estimation accuracy.
Navigation and Control of Unconventional VTOL UAVs in Forward-Flight with Explicit Wind Velocity Estimation
Feb 29, 2024



This paper presents a solution for the state estimation and control problems for a class of unconventional vertical takeoff and landing (VTOL) UAVs operating in forward-flight conditions. A tightly-coupled state estimation approach is used to estimate the aircraft navigation states, sensor biases, and the wind velocity. State estimation is done within a matrix Lie group framework using the Invariant Extended Kalman Filter (IEKF), which offers several advantages compared to standard multiplicative EKFs traditionally used in aerospace and robotics problems. An SO(3)- based attitude controller is employed, leading to a single attitude control law without a separate sideslip control loop. A control allocator is used to determine how to use multiple, possibly redundant, actuators to produce the desired control moments. The wind velocity estimates are used in the attitude controller and the control allocator to improve performance. A numerical example is considered using a sample VTOL tailsitter-type UAV with four control surfaces. Monte-Carlo simulations demonstrate robustness of the proposed control and estimation scheme to various initial conditions, noise levels, and flight trajectories.
* 8 pages, 7 figures, published in Robotics and Automation Letters