 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast and Accurate Collision Probability Estimation for Autonomous Vehicles using Adaptive Sigma-Point Sampling
Jul 08, 2025A novel algorithm is presented for the estimation of collision probabilities between dynamic objects with uncertain trajectories, where the trajectories are given as a sequence of poses with Gaussian distributions. We propose an adaptive sigma-point sampling scheme, which ultimately produces a fast, simple algorithm capable of estimating the collision probability with a median error of 3.5%, and a median runtime of 0.21ms, when measured on an Intel Xeon Gold 6226R Processor. Importantly, the algorithm explicitly accounts for the collision probability's temporal dependence, which is often neglected in prior work and otherwise leads to an overestimation of the collision probability. Finally, the method is tested on a diverse set of relevant real-world scenarios, consisting of 400 6-second snippets of autonomous vehicle logs, where the accuracy and latency is rigorously evaluated.
MILUV: A Multi-UAV Indoor Localization dataset with UWB and Vision
Apr 19, 2025This paper introduces MILUV, a Multi-UAV Indoor Localization dataset with UWB and Vision measurements. This dataset comprises 217 minutes of flight time over 36 experiments using three quadcopters, collecting ultra-wideband (UWB) ranging data such as the raw timestamps and channel-impulse response data, vision data from a stereo camera and a bottom-facing monocular camera, inertial measurement unit data, height measurements from a laser rangefinder, magnetometer data, and ground-truth poses from a motion-capture system. The UWB data is collected from up to 12 transceivers affixed to mobile robots and static tripods in both line-of-sight and non-line-of-sight conditions. The UAVs fly at a maximum speed of 4.418 m/s in an indoor environment with visual fiducial markers as features. MILUV is versatile and can be used for a wide range of applications beyond localization, but the primary purpose of MILUV is for testing and validating multi-robot UWB- and vision-based localization algorithms. The dataset can be downloaded at https://doi.org/10.25452/figshare.plus.28386041.v1. A development kit is presented alongside the MILUV dataset, which includes benchmarking algorithms such as visual-inertial odometry, UWB-based localization using an extended Kalman filter, and classification of CIR data using machine learning approaches. The development kit can be found at https://github.com/decargroup/miluv, and is supplemented with a website available at https://decargroup.github.io/miluv/.
navlie: A Python Package for State Estimation on Lie Groups
Oct 24, 2023The ability to rapidly test a variety of algorithms for an arbitrary state estimation task is valuable in the prototyping phase of navigation systems. Lie group theory is now mainstream in the robotics community, and hence estimation prototyping tools should allow state definitions that belong to manifolds. A new package, called navlie, provides a framework that allows a user to model a large class of problems by implementing a set of classes complying with a generic interface. Once accomplished, navlie provides a variety of on-manifold estimation algorithms that can run directly on these classes. The package also provides a built-in library of common models, as well as many useful utilities. The open-source project can be found at https://github.com/decargroup/navlie.
IMU Preintegration for Multi-Robot Systems in the Presence of Bias and Communication Constraints
Oct 16, 2023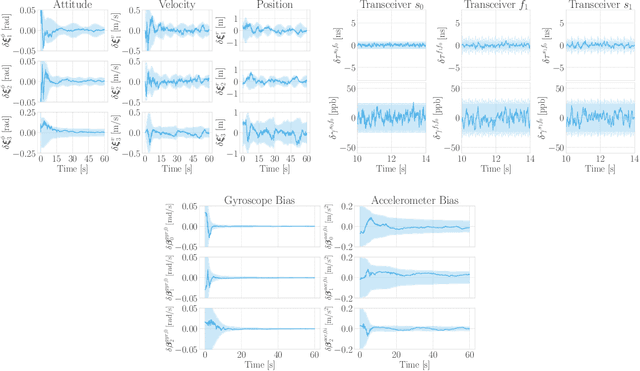
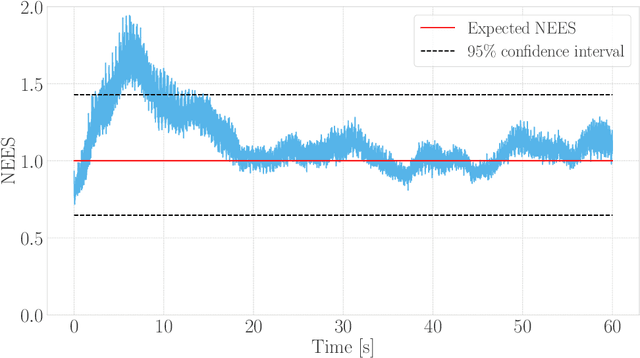
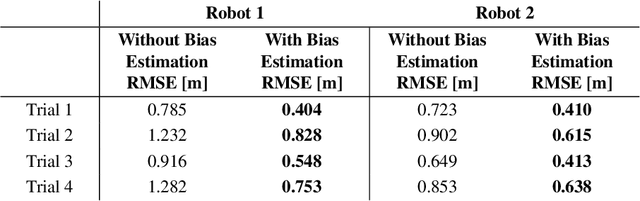
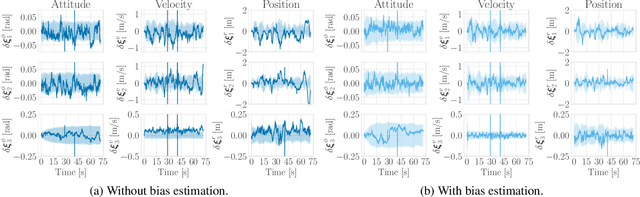
This document is in supplement to the paper titled "Multi-Robot Relative Pose Estimation and IMU Preintegration Using Passive UWB Transceivers", available at [1]. The purpose of this document is to show how IMU biases can be incorporated into the framework presented in [1], while maintaining the differential Sylvester equation form of the process model.
Magnetic Navigation using Attitude-Invariant Magnetic Field Information for Loop Closure Detection
Sep 05, 2023



Indoor magnetic fields are a combination of Earth's magnetic field and disruptions induced by ferromagnetic objects, such as steel structural components in buildings. As a result of these disruptions, pervasive in indoor spaces, magnetic field data is often omitted from navigation algorithms in indoor environments. This paper leverages the spatially-varying disruptions to Earth's magnetic field to extract positional information for use in indoor navigation algorithms. The algorithm uses a rate gyro and an array of four magnetometers to estimate the robot's pose. Additionally, the magnetometer array is used to compute attitude-invariant measurements associated with the magnetic field and its gradient. These measurements are used to detect loop closure points. Experimental results indicate that the proposed approach can estimate the pose of a ground robot in an indoor environment within meter accuracy.
On-manifold Decentralized State Estimation using Pseudomeasurements and Preintegration
Apr 12, 2023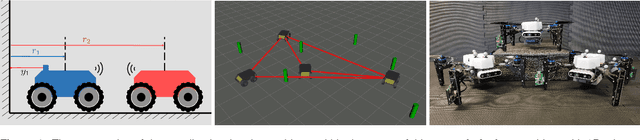
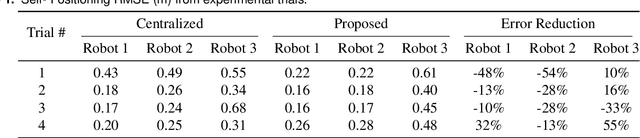
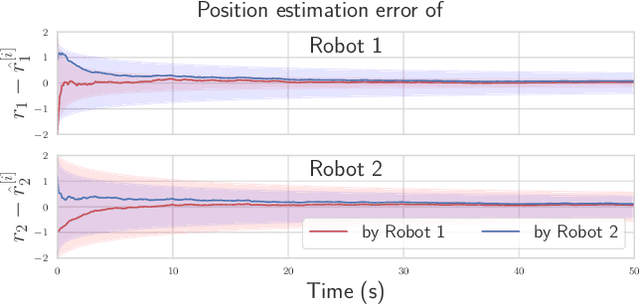
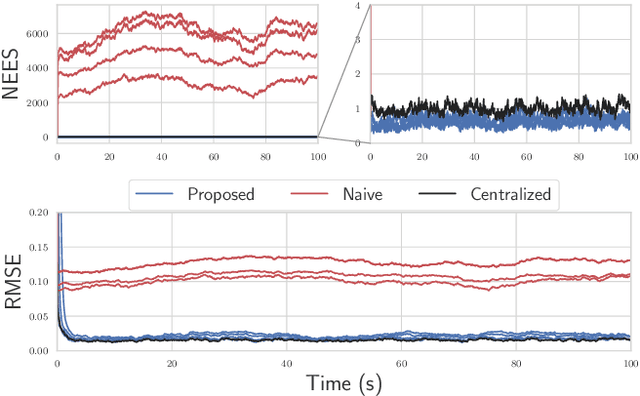
This paper addresses the problem of decentralized, collaborative state estimation in robotic teams. In particular, this paper considers problems where individual robots estimate similar physical quantities, such as each other's position relative to themselves. The use of pseudomeasurements is introduced as a means of modelling such relationships between robots' state estimates, and is shown to be a tractable way to approach the decentralized state estimation problem. Moreover, this formulation easily leads to a general-purpose observability test that simultaneously accounts for measurements that robots collect from their own sensors, as well as the communication structure within the team. Finally, input preintegration is proposed as a communication-efficient way of sharing odometry information between robots, and the entire theory is appropriate for both vector-space and Lie-group state definitions. The proposed framework is evaluated on three different simulated problems, and one experiment involving three quadcopters.
Multi-Robot Relative Pose Estimation and IMU Preintegration Using Passive UWB Transceivers
Apr 12, 2023



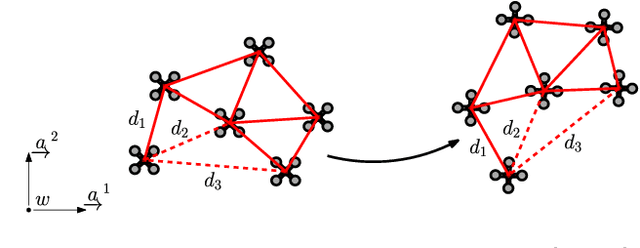
Ultra-wideband (UWB) systems are becoming increasingly popular as a means of inter-robot ranging and communication. A major constraint associated with UWB is that only one pair of UWB transceivers can range at a time to avoid interference, hence hindering the scalability of UWB-based localization. In this paper, a ranging protocol is proposed that allows all robots to passively listen on neighbouring communicating robots without any hierarchical restrictions on the role of the robots. This is utilized to allow each robot to obtain more range measurements and to broadcast preintegrated inertial measurement unit (IMU) measurements for relative extended pose state estimation directly on SE_2(3). Consequently, a simultaneous clock-synchronization and relative-pose estimator (CSRPE) is formulated using an on-manifold extended Kalman filter (EKF) and is evaluated in simulation using Monte-Carlo runs for up to 7 robots. The ranging protocol is implemented in C on custom-made UWB boards fitted to 3 quadcopters, and the proposed filter is evaluated over multiple experimental trials, yielding up to 56% improvement in localization accuracy.
Reducing Two-Way Ranging Variance by Signal-Timing Optimization
Nov 01, 2022


Time-of-flight-based range measurements among transceivers with different clocks requires ranging protocols that accommodate for the varying rates of the clocks. Double-sided two-way ranging (DS-TWR) has recently been widely adopted as a standard protocol due to its accuracy; however, the precision of DS-TWR has not been clearly addressed. In this paper, an analytical model of the variance of DS-TWR is derived as a function of the user-programmed response delays. Consequently, this allows formulating an optimization problem over the response delays in order to maximize the information gained from range measurements by addressing the effect of varying the response delays on the precision and frequency of the measurements. The derived analytical variance model and proposed optimization formulation are validated experimentally with 2 ranging UWB transceivers, where 29 million range measurements are collected.
Calibration and Uncertainty Characterization for Ultra-Wideband Two-Way-Ranging Measurements
Oct 14, 2022
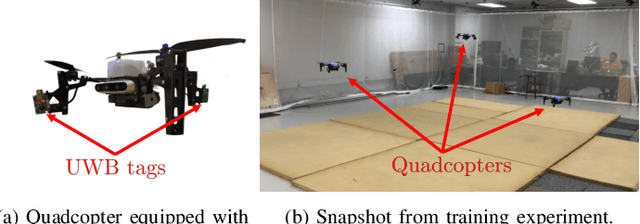
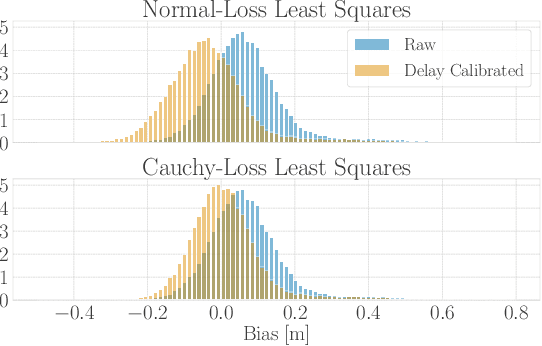

Ultra-Wideband (UWB) systems are becoming increasingly popular for indoor localization, where range measurements are obtained by measuring the time-of-flight of radio signals. However, the range measurements typically suffer from a systematic error or bias that must be corrected for high-accuracy localization. In this paper, a ranging protocol is proposed alongside a robust and scalable antenna-delay calibration procedure to accurately and efficiently calibrate antenna delays for many UWB tags. Additionally, the bias and uncertainty of the measurements are modelled as a function of the received-signal power. The full calibration procedure is presented using experimental training data of 3 aerial robots fitted with 2 UWB tags each, and then evaluated on 2 test experiments. A localization problem is then formulated on the experimental test data, and the calibrated measurements and their modelled uncertainty are fed into an extended Kalman filter (EKF). The proposed calibration is shown to yield an average of 46% improvement in localization accuracy. Lastly, the paper is accompanied by an open-source UWB-calibration Python library, which can be found at https://github.com/decarsg/uwb_calibration.
Relative Position Estimation in Multi-Agent Systems Using Attitude-Coupled Range Measurements
Jul 16, 2022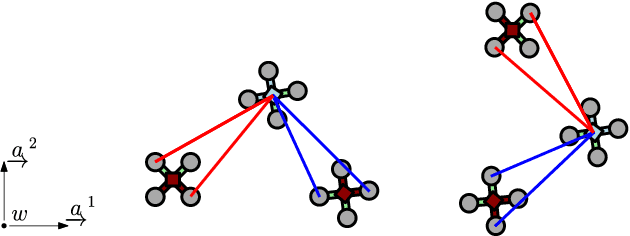


The ability to accurately estimate the position of robotic agents relative to one another, in possibly GPS-denied environments, is crucial to execute collaborative tasks. Inter-agent range measurements are available at a low cost, due to technologies such as ultra-wideband radio. However, the task of three-dimensional relative position estimation using range measurements in multi-agent systems suffers from unobservabilities. This letter presents a sufficient condition for the observability of the relative positions, and satisfies the condition using a simple framework with only range measurements, an accelerometer, a rate gyro, and a magnetometer. The framework has been tested in simulation and in experiments, where 40-50 cm positioning accuracy is achieved using inexpensive off-the-shelf hardware.
* 7 pages, 10 figures, published in IEEE Robotics and Automation Letters