 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRelative Position Estimation in Multi-Agent Systems Using Attitude-Coupled Range Measurements
Jul 16, 2022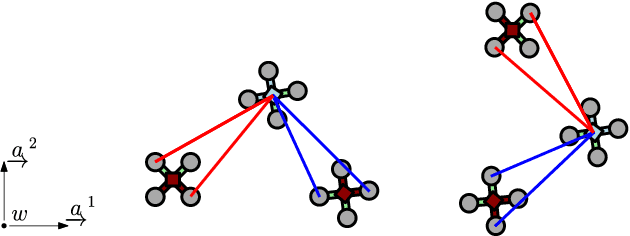
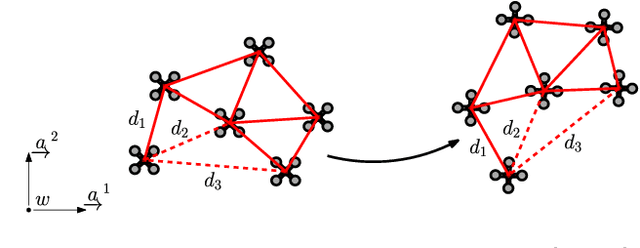


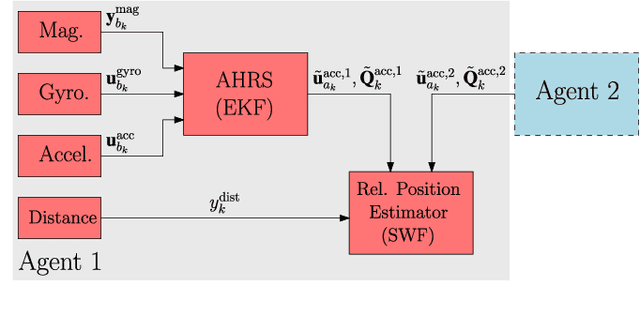
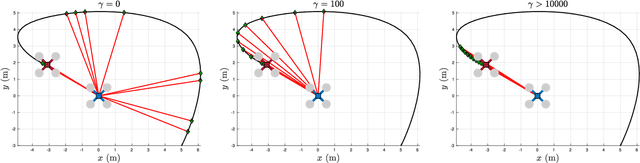
The ability to accurately estimate the position of robotic agents relative to one another, in possibly GPS-denied environments, is crucial to execute collaborative tasks. Inter-agent range measurements are available at a low cost, due to technologies such as ultra-wideband radio. However, the task of three-dimensional relative position estimation using range measurements in multi-agent systems suffers from unobservabilities. This letter presents a sufficient condition for the observability of the relative positions, and satisfies the condition using a simple framework with only range measurements, an accelerometer, a rate gyro, and a magnetometer. The framework has been tested in simulation and in experiments, where 40-50 cm positioning accuracy is achieved using inexpensive off-the-shelf hardware.
* 7 pages, 10 figures, published in IEEE Robotics and Automation Letters
Localization with Directional Coordinates
Sep 19, 2021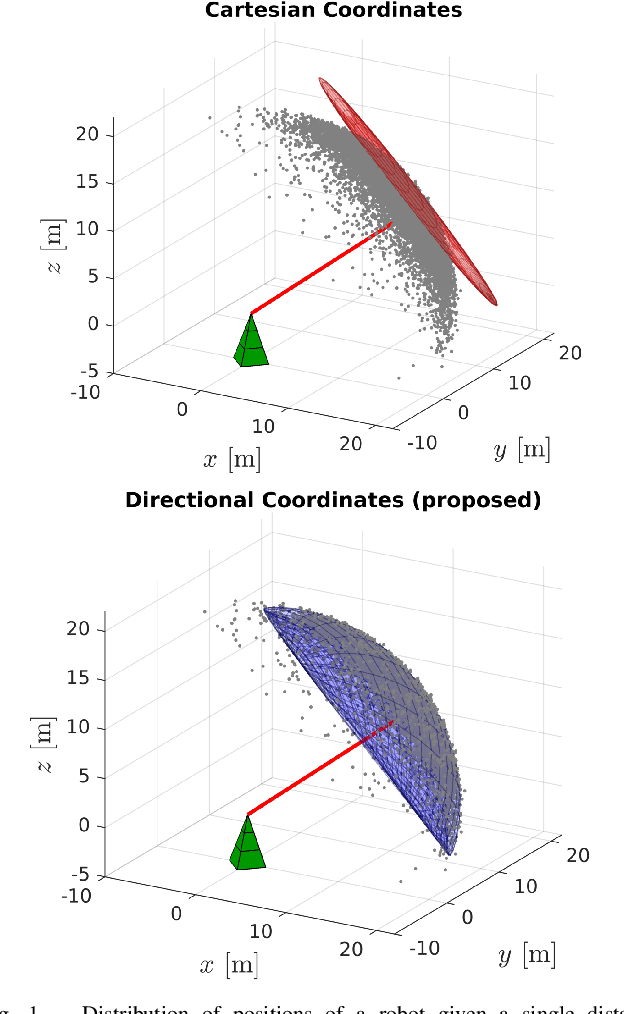
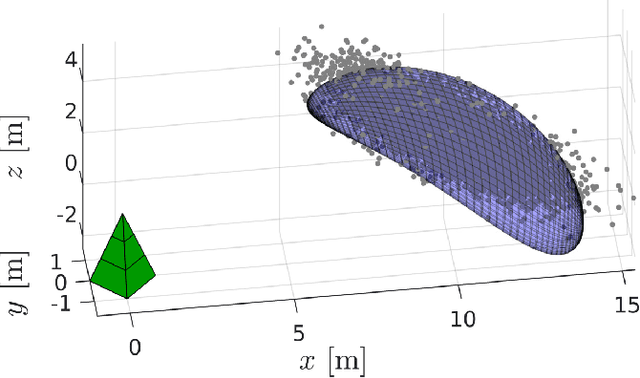
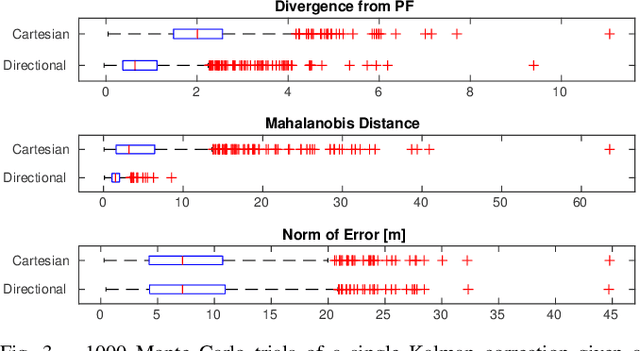
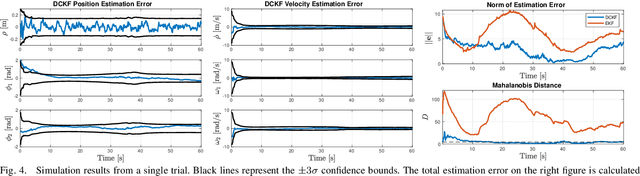
A coordinate system is proposed that replaces the usual three-dimensional Cartesian x,y,z position coordinates, for use in robotic localization applications. Range, azimuth, and elevation measurement models become greatly simplified, and, unlike spherical coordinates, the proposed coordinates do not suffer from the same kinematic singularities and angle wrap-around. When compared to Cartesian coordinates, the proposed coordinate system results in a significantly enhanced ability to represent the true distribution of robot positions, ultimately leading to large improvements in state estimation consistency.
Heading Estimation Using Ultra-Wideband Received Signal Strength and Gaussian Processes
Sep 10, 2021
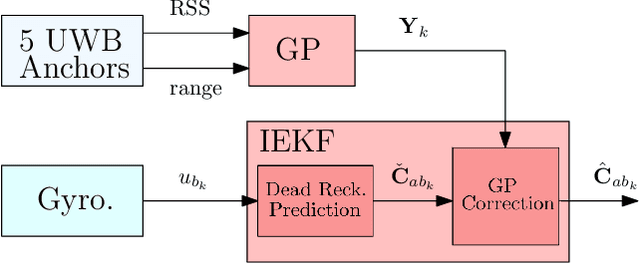
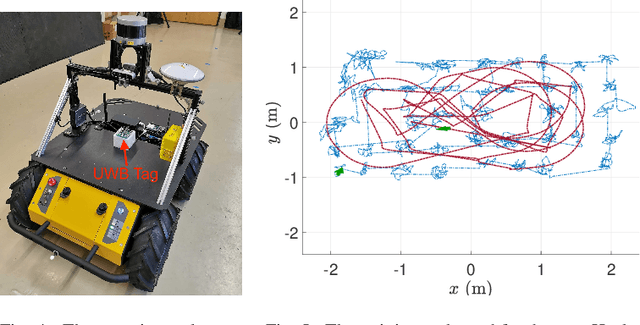
It is essential that a robot has the ability to determine its position and orientation to execute tasks autonomously. Heading estimation is especially challenging in indoor environments where magnetic distortions make magnetometer-based heading estimation difficult. Ultra-wideband (UWB) transceivers are common in indoor localization problems. This letter experimentally demonstrates how to use UWB range and received signal strength (RSS) measurements to estimate robot heading. The RSS of a UWB antenna varies with its orientation. As such, a Gaussian process (GP) is used to learn a data-driven relationship from UWB range and RSS inputs to orientation outputs. Combined with a gyroscope in an invariant extended Kalman filter, this realizes a heading estimation method that uses only UWB and gyroscope measurements.
Relative Position Estimation Between Two UWB Devices with IMUs
Apr 21, 2021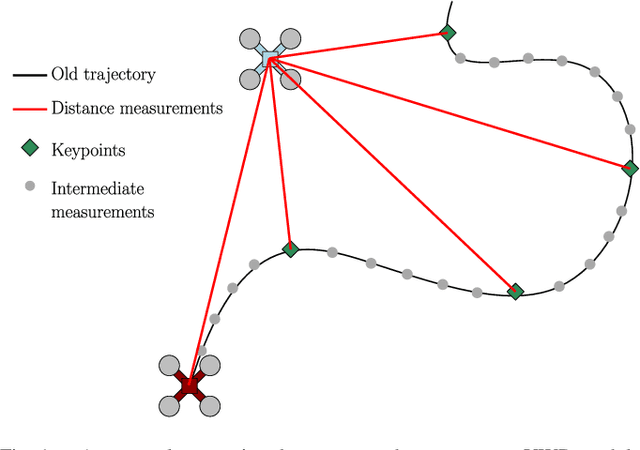
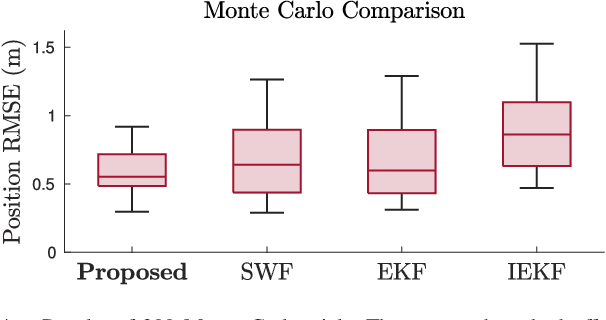
For a team of robots to work collaboratively, it is crucial that each robot have the ability to determine the position of their neighbors, relative to themselves, in order to execute tasks autonomously. This letter presents an algorithm for determining the three-dimensional relative position between two mobile robots, each using nothing more than a single ultra-wideband transceiver, an accelerometer, a rate gyro, and a magnetometer. A sliding window filter estimates the relative position at selected keypoints by combining the distance measurements with acceleration estimates, which each agent computes using an on-board attitude estimator. The algorithm is appropriate for real-time implementation, and has been tested in simulation and experiment, where it comfortably outperforms standard estimators. A positioning accuracy of less than 1 meter is achieved with inexpensive sensors.
* 8 pages, 9 figures, published in IEEE Robotics and Automation Letters
Cascaded Filtering Using the Sigma Point Transformation (Extended Version)
Mar 07, 2021
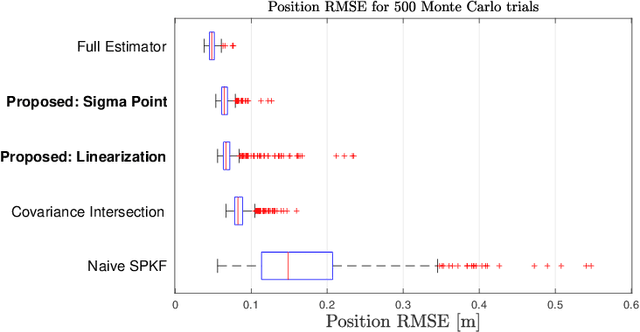


It is often convenient to separate a state estimation task into smaller "local" tasks, where each local estimator estimates a subset of the overall system state. However, neglecting cross-covariance terms between state estimates can result in overconfident estimates, which can ultimately degrade the accuracy of the estimator. Common cascaded filtering techniques focus on the problem of modelling cross-covariances when the local estimators share a common state vector. This letter introduces a novel cascaded and decentralized filtering approach that approximates the cross-covariances when the local estimators consider distinct state vectors. The proposed estimator is validated in simulations and in experiments on a three-dimensional attitude and position estimation problem. The proposed approach is compared to a naive cascaded filtering approach that neglects cross-covariance terms, a sigma point-based Covariance Intersection filter, and a full-state filter. In both simulations and experiments, the proposed filter outperforms the naive and the Covariance Intersection filters, while performing comparatively to the full-state filter.