 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRelative Position Estimation Between Two UWB Devices with IMUs
Apr 21, 2021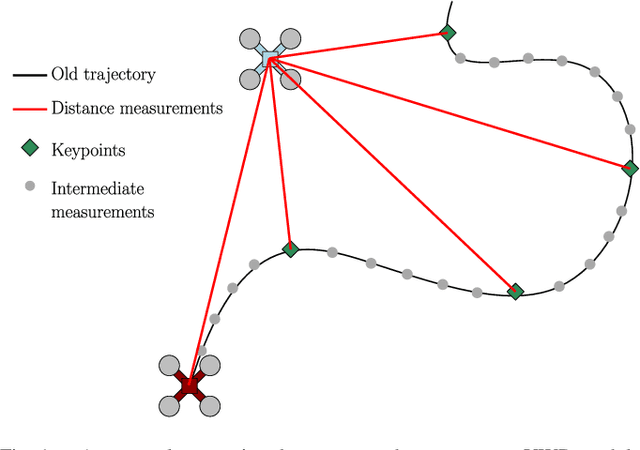
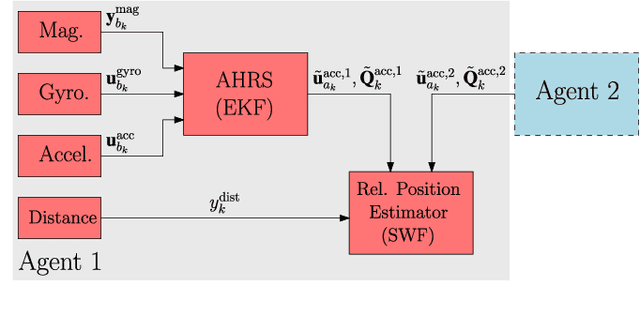
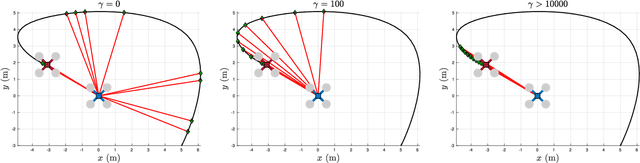
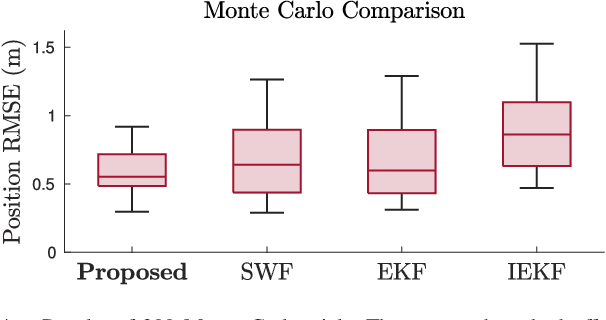
For a team of robots to work collaboratively, it is crucial that each robot have the ability to determine the position of their neighbors, relative to themselves, in order to execute tasks autonomously. This letter presents an algorithm for determining the three-dimensional relative position between two mobile robots, each using nothing more than a single ultra-wideband transceiver, an accelerometer, a rate gyro, and a magnetometer. A sliding window filter estimates the relative position at selected keypoints by combining the distance measurements with acceleration estimates, which each agent computes using an on-board attitude estimator. The algorithm is appropriate for real-time implementation, and has been tested in simulation and experiment, where it comfortably outperforms standard estimators. A positioning accuracy of less than 1 meter is achieved with inexpensive sensors.
* 8 pages, 9 figures, published in IEEE Robotics and Automation Letters
Design of a Trajectory Tracking Controller for a Nanoquadcopter
Aug 20, 2016


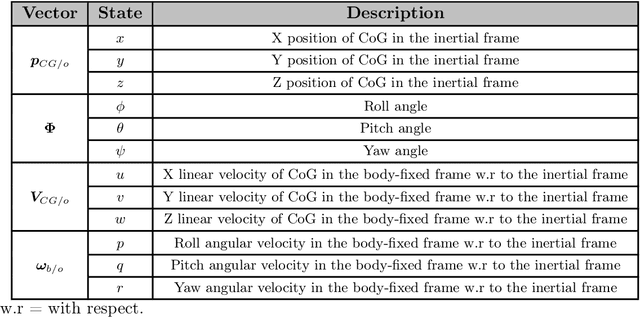
The primary purpose of this study is to investigate the system modeling of a nanoquadcopter as well as designing position and trajectory control algorithms, with the ultimate goal of testing the system both in simulation and on a real platform. The open source nanoquadcopter platform named Crazyflie 2.0 was chosen for the project. The first phase consisted in the development of a mathematical model that describes the dynamics of the quadcopter. Secondly, a simulation environment was created to design two different control architectures: cascaded PID position tracker and LQT trajectory tracker. Finally, the implementation phase consisted in testing the controllers on the chosen platform and comparing their performance in trajectory tracking. Our simulations agreed with the experimental results, and further refinement of the model is proposed as future work through closed-loop model identification techniques. The results show that the LQT controller performed better at tracking trajectories, with RMS errors in position up to four times smaller than those obtained with the PID. LQT control effort was greater, but eliminated the high control peaks that induced motor saturation in the PID controller. The LQT controller was also tested using an ultra-wide band two-way ranging system, and comparisons with the more precise VICON system indicate that the controller could track a trajectory in both cases despise the difference in noise levels between the two systems.