 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGaussian-Sum Filter for Range-based 3D Relative Pose Estimation in the Presence of Ambiguities
Feb 13, 2024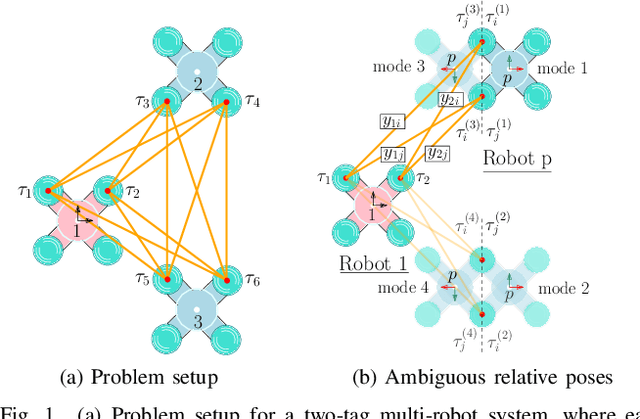
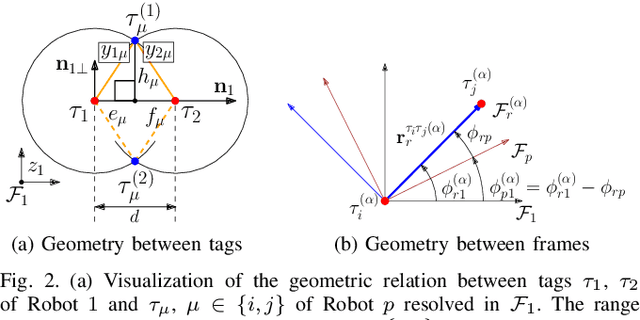
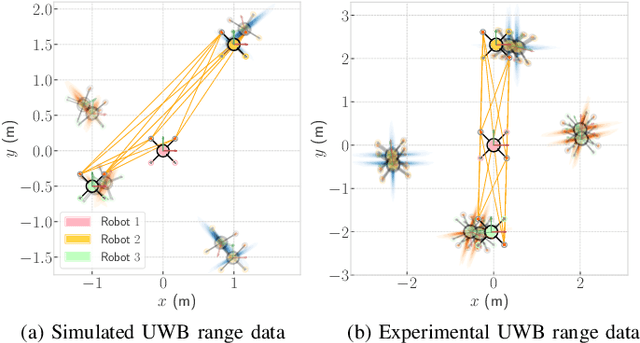
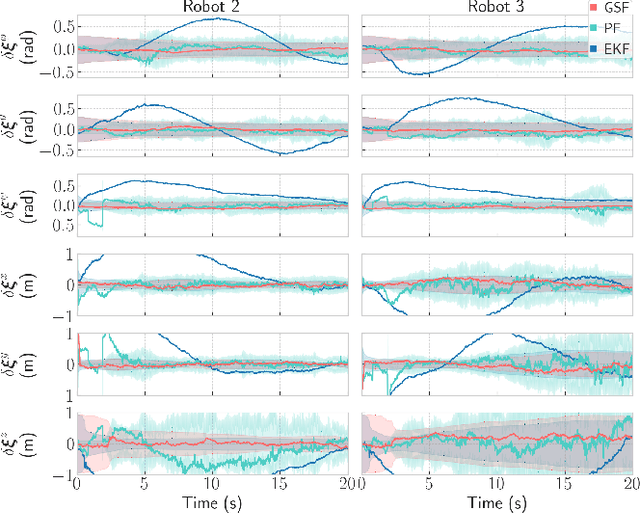
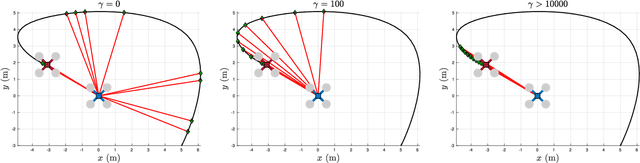
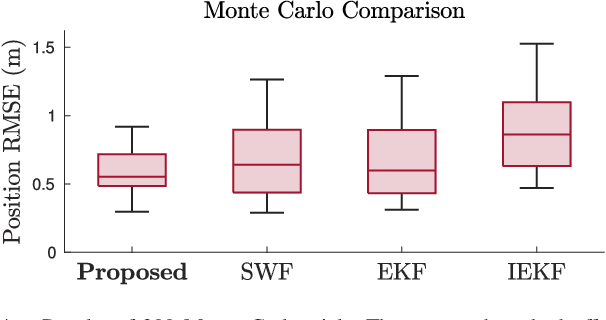
Multi-robot systems must have the ability to accurately estimate relative states between robots in order to perform collaborative tasks, possibly with no external aiding. Three-dimensional relative pose estimation using range measurements oftentimes suffers from a finite number of non-unique solutions, or ambiguities. This paper: 1) identifies and accurately estimates all possible ambiguities in 2D; 2) treats them as components of a Gaussian mixture model; and 3) presents a computationally-efficient estimator, in the form of a Gaussian-sum filter (GSF), to realize range-based relative pose estimation in an infrastructure-free, 3D, setup. This estimator is evaluated in simulation and experiment and is shown to avoid divergence to local minima induced by the ambiguous poses. Furthermore, the proposed GSF outperforms an extended Kalman filter, demonstrates similar performance to the computationally-demanding particle filter, and is shown to be consistent.
STAR-loc: Dataset for STereo And Range-based localization
Sep 11, 2023


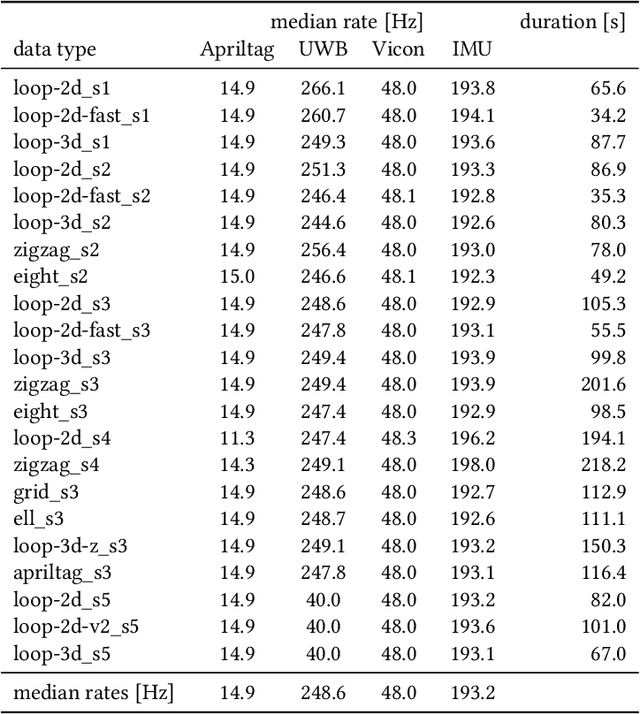
This document contains a detailed description of the STAR-loc dataset. For a quick starting guide please refer to the associated Github repository (https://github.com/utiasASRL/starloc). The dataset consists of stereo camera data (rectified/raw images and inertial measurement unit measurements) and ultra-wideband (UWB) data (range measurements) collected on a sensor rig in a Vicon motion capture arena. The UWB anchors and visual landmarks (Apriltags) are of known position, so the dataset can be used for both localization and Simultaneous Localization and Mapping (SLAM).
Relative Position Estimation Between Two UWB Devices with IMUs
Apr 21, 2021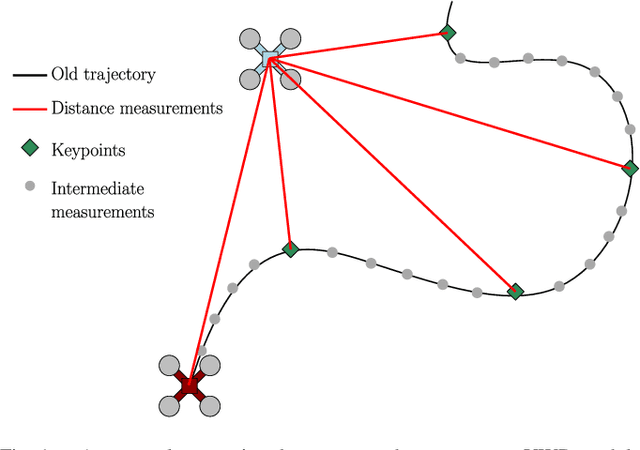
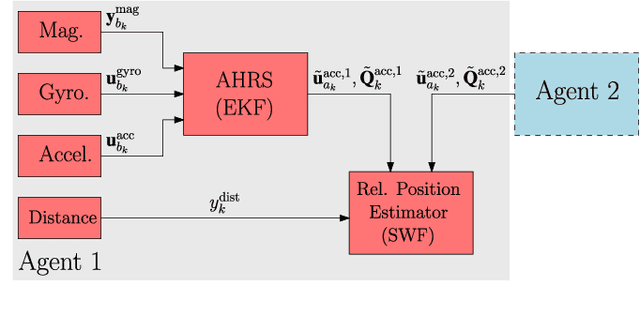
For a team of robots to work collaboratively, it is crucial that each robot have the ability to determine the position of their neighbors, relative to themselves, in order to execute tasks autonomously. This letter presents an algorithm for determining the three-dimensional relative position between two mobile robots, each using nothing more than a single ultra-wideband transceiver, an accelerometer, a rate gyro, and a magnetometer. A sliding window filter estimates the relative position at selected keypoints by combining the distance measurements with acceleration estimates, which each agent computes using an on-board attitude estimator. The algorithm is appropriate for real-time implementation, and has been tested in simulation and experiment, where it comfortably outperforms standard estimators. A positioning accuracy of less than 1 meter is achieved with inexpensive sensors.
* 8 pages, 9 figures, published in IEEE Robotics and Automation Letters