 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn-manifold Decentralized State Estimation using Pseudomeasurements and Preintegration
Apr 12, 2023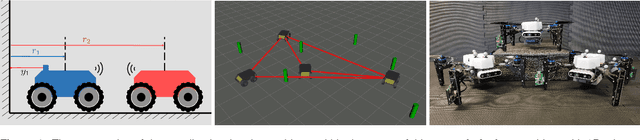
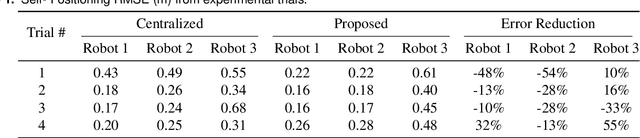
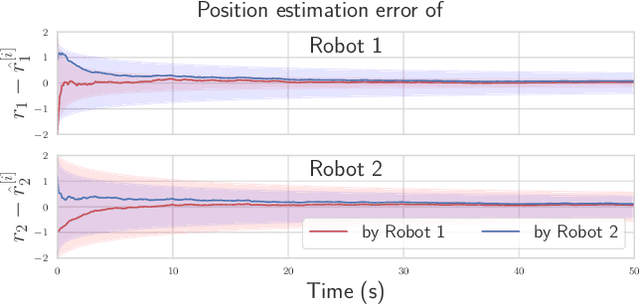
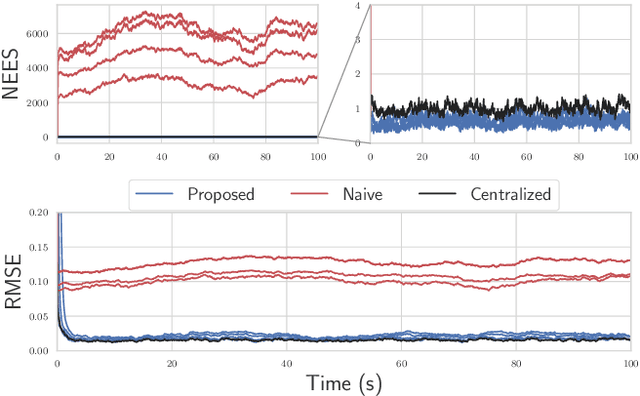
This paper addresses the problem of decentralized, collaborative state estimation in robotic teams. In particular, this paper considers problems where individual robots estimate similar physical quantities, such as each other's position relative to themselves. The use of pseudomeasurements is introduced as a means of modelling such relationships between robots' state estimates, and is shown to be a tractable way to approach the decentralized state estimation problem. Moreover, this formulation easily leads to a general-purpose observability test that simultaneously accounts for measurements that robots collect from their own sensors, as well as the communication structure within the team. Finally, input preintegration is proposed as a communication-efficient way of sharing odometry information between robots, and the entire theory is appropriate for both vector-space and Lie-group state definitions. The proposed framework is evaluated on three different simulated problems, and one experiment involving three quadcopters.
Localization with Directional Coordinates
Sep 19, 2021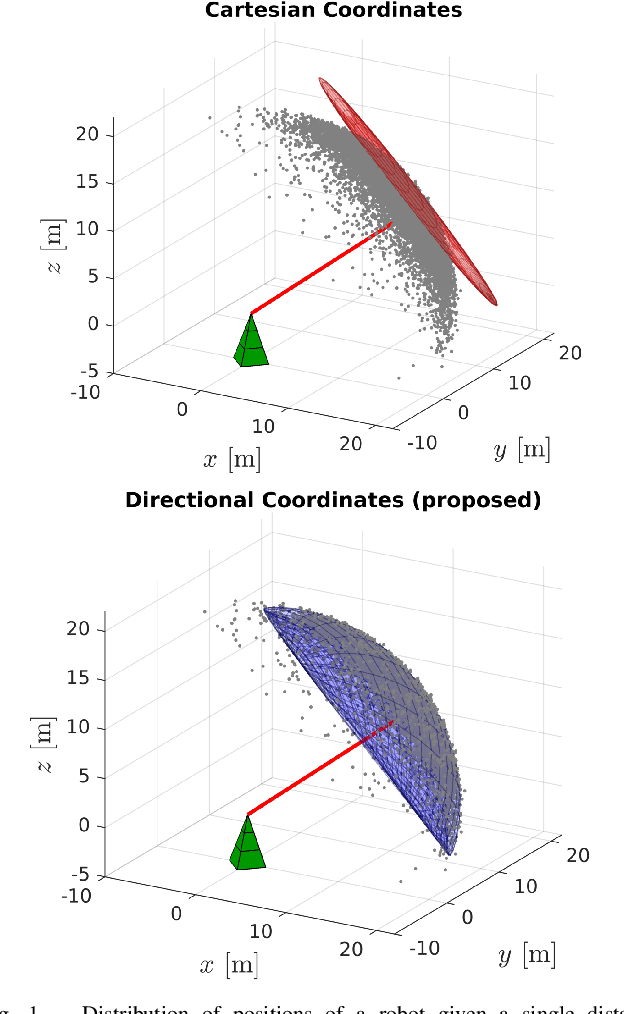
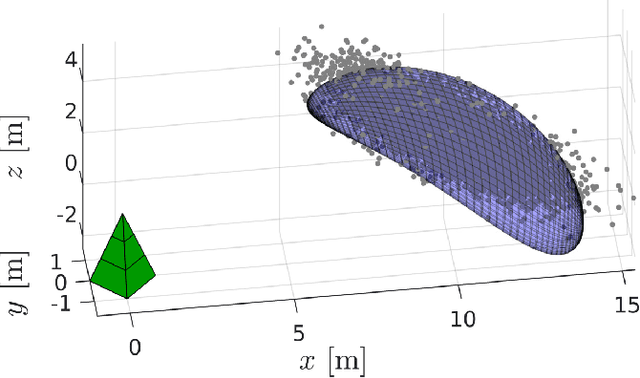
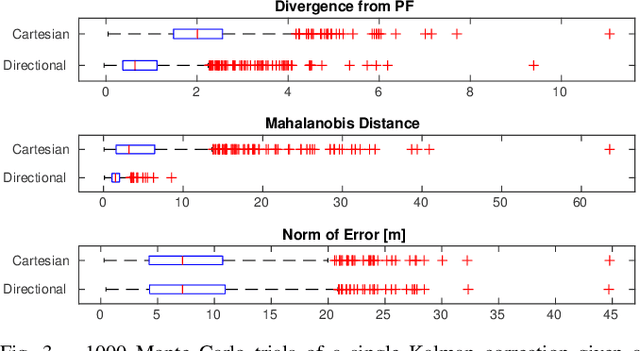
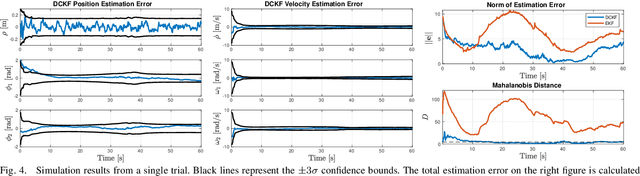
A coordinate system is proposed that replaces the usual three-dimensional Cartesian x,y,z position coordinates, for use in robotic localization applications. Range, azimuth, and elevation measurement models become greatly simplified, and, unlike spherical coordinates, the proposed coordinates do not suffer from the same kinematic singularities and angle wrap-around. When compared to Cartesian coordinates, the proposed coordinate system results in a significantly enhanced ability to represent the true distribution of robot positions, ultimately leading to large improvements in state estimation consistency.
Relative Position Estimation Between Two UWB Devices with IMUs
Apr 21, 2021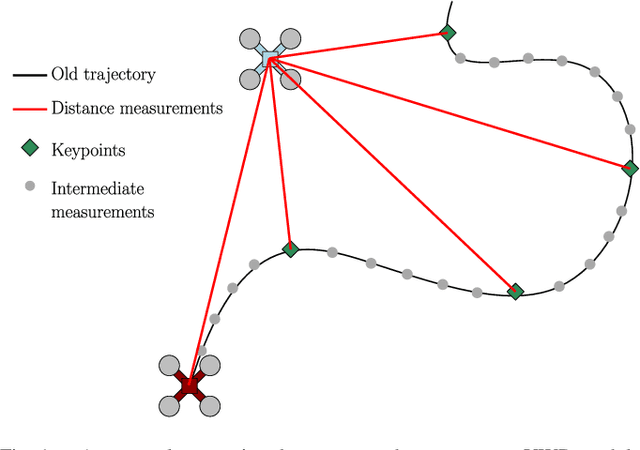
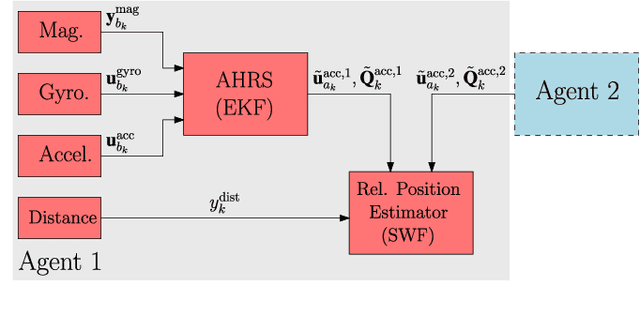
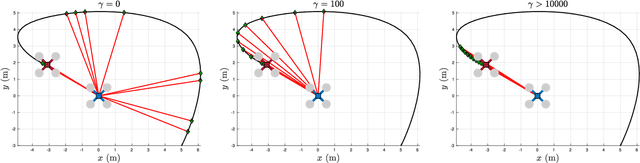
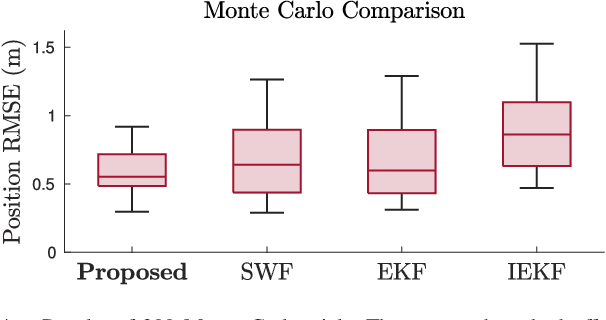
For a team of robots to work collaboratively, it is crucial that each robot have the ability to determine the position of their neighbors, relative to themselves, in order to execute tasks autonomously. This letter presents an algorithm for determining the three-dimensional relative position between two mobile robots, each using nothing more than a single ultra-wideband transceiver, an accelerometer, a rate gyro, and a magnetometer. A sliding window filter estimates the relative position at selected keypoints by combining the distance measurements with acceleration estimates, which each agent computes using an on-board attitude estimator. The algorithm is appropriate for real-time implementation, and has been tested in simulation and experiment, where it comfortably outperforms standard estimators. A positioning accuracy of less than 1 meter is achieved with inexpensive sensors.
* 8 pages, 9 figures, published in IEEE Robotics and Automation Letters
Autonomous Landing of a Multirotor Micro Air Vehicle on a High Velocity Ground Vehicle
Nov 22, 2016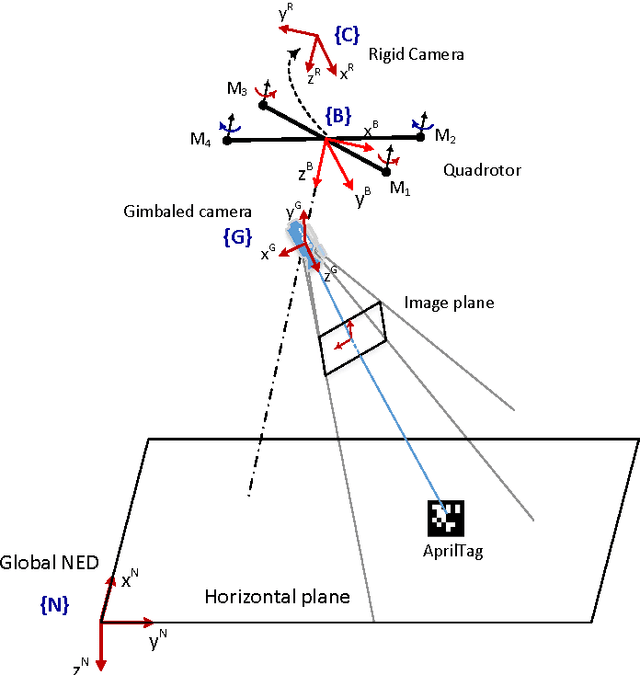
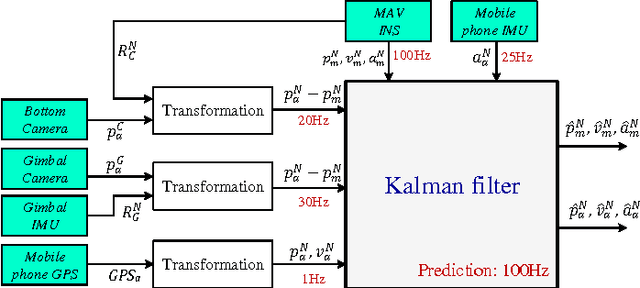
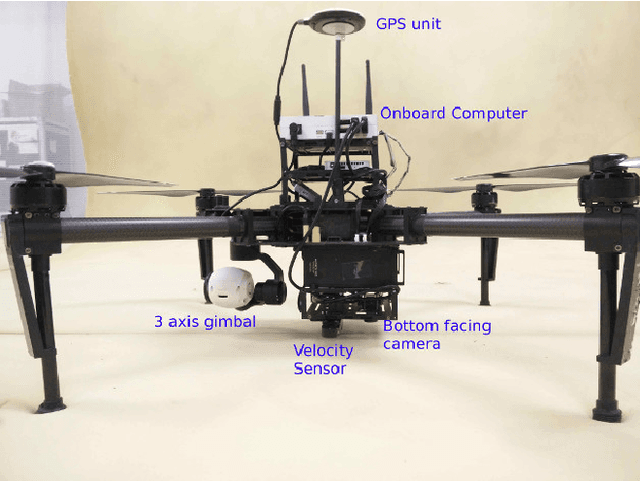
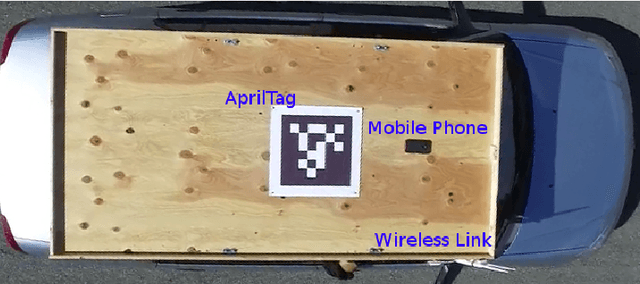
While autonomous multirotor micro aerial vehicles (MAVs) are uniquely well suited for certain types of missions benefiting from stationary flight capabilities, their more widespread usage still faces many hurdles, due in particular to their limited range and the difficulty of fully automating their deployment and retrieval. In this paper we address these issues by solving the problem of the automated landing of a quadcopter on a ground vehicle moving at relatively high speed. We present our system architecture, including the structure of our Kalman filter for the estimation of the relative position and velocity between the quadcopter and the landing pad, as well as our controller design for the full rendezvous and landing maneuvers. The system is experimentally validated by successfully landing in multiple trials a commercial quadcopter on the roof of a car moving at speeds of up to 50 km/h.