 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Motion Planning Strategy for the Active Vision-Based Mapping of Ground-Level Structures
Nov 11, 2017



This paper presents a strategy to guide a mobile ground robot equipped with a camera or depth sensor, in order to autonomously map the visible part of a bounded three-dimensional structure. We describe motion planning algorithms that determine appropriate successive viewpoints and attempt to fill holes automatically in a point cloud produced by the sensing and perception layer. The emphasis is on accurately reconstructing a 3D model of a structure of moderate size rather than mapping large open environments, with applications for example in architecture, construction and inspection. The proposed algorithms do not require any initialization in the form of a mesh model or a bounding box, and the paths generated are well adapted to situations where the vision sensor is used simultaneously for mapping and for localizing the robot, in the absence of additional absolute positioning system. We analyze the coverage properties of our policy, and compare its performance to the classic frontier based exploration algorithm. We illustrate its efficacy for different structure sizes, levels of localization accuracy and range of the depth sensor, and validate our design on a real-world experiment.
Autonomous Landing of a Multirotor Micro Air Vehicle on a High Velocity Ground Vehicle
Nov 22, 2016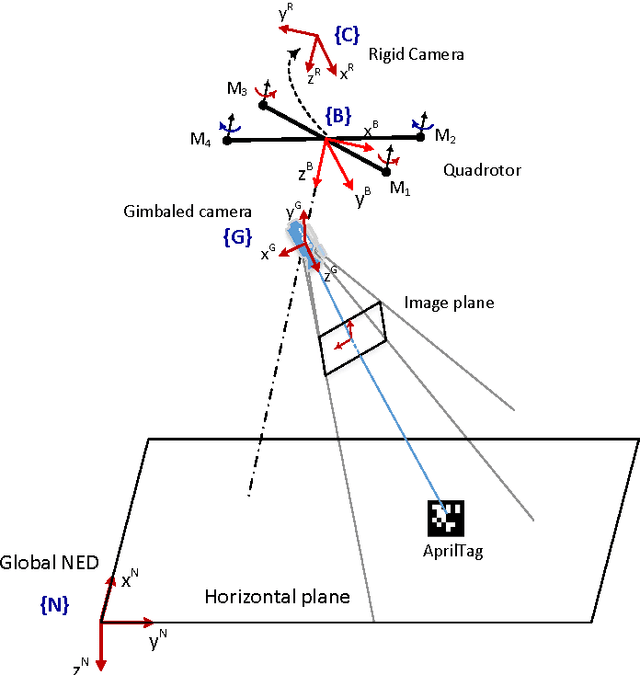
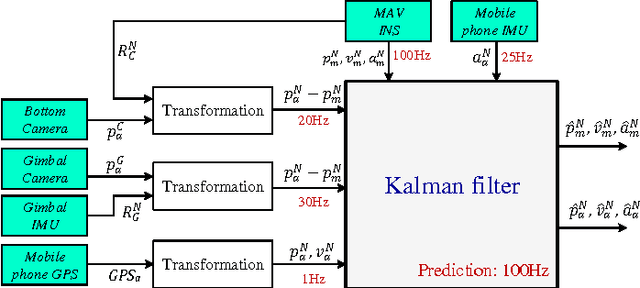
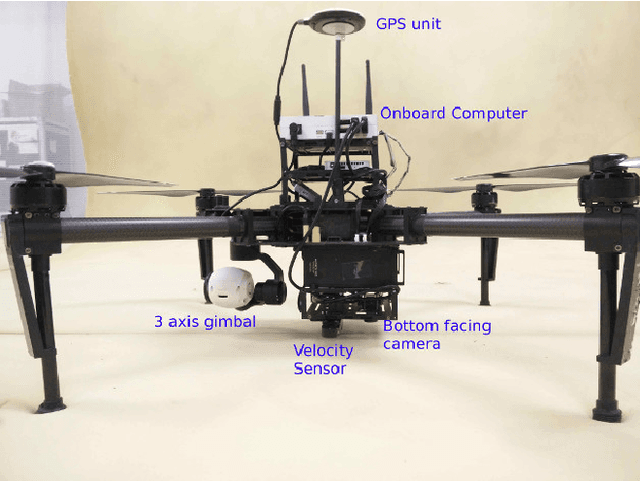
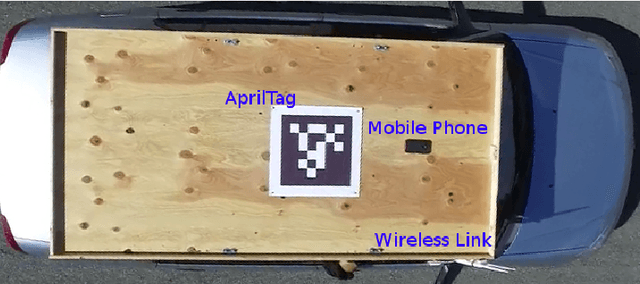
While autonomous multirotor micro aerial vehicles (MAVs) are uniquely well suited for certain types of missions benefiting from stationary flight capabilities, their more widespread usage still faces many hurdles, due in particular to their limited range and the difficulty of fully automating their deployment and retrieval. In this paper we address these issues by solving the problem of the automated landing of a quadcopter on a ground vehicle moving at relatively high speed. We present our system architecture, including the structure of our Kalman filter for the estimation of the relative position and velocity between the quadcopter and the landing pad, as well as our controller design for the full rendezvous and landing maneuvers. The system is experimentally validated by successfully landing in multiple trials a commercial quadcopter on the roof of a car moving at speeds of up to 50 km/h.