Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal Multi-robot Formations for Relative Pose Estimation Using Range Measurements
May 27, 2022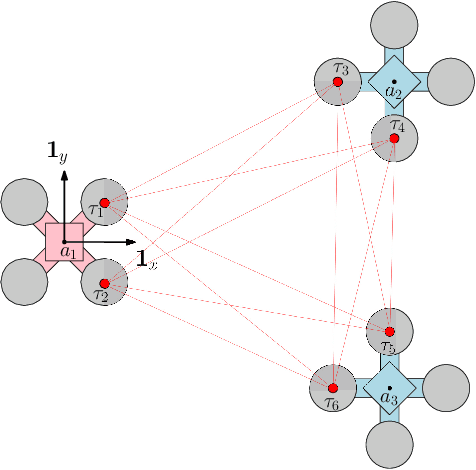


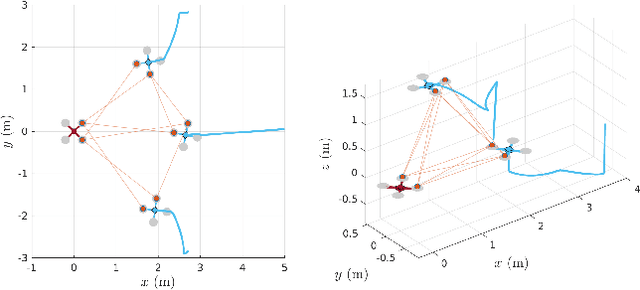
In multi-robot missions, relative position and attitude information between agents is valuable for a variety of tasks such as mapping, planning, and formation control. In this paper, the problem of estimating relative poses from a set of inter-agent range measurements is investigated. Specifically, it is shown that the estimation accuracy is highly dependent on the true relative poses themselves, which prompts the desire to find multi-agent formations that provide the best estimation performance. By direct maximization of Fischer information, it is shown in simulation and experiment that large improvements in estimation accuracy can be obtained by optimizing the formation geometry of a team of robots.
* 7 pages, 8 figures, submitted to International Conference on
Intelligent Robots and Systems
Via