 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGlobally Optimal Data-Association-Free Landmark-Based Localization Using Semidefinite Relaxations
Paper and Code
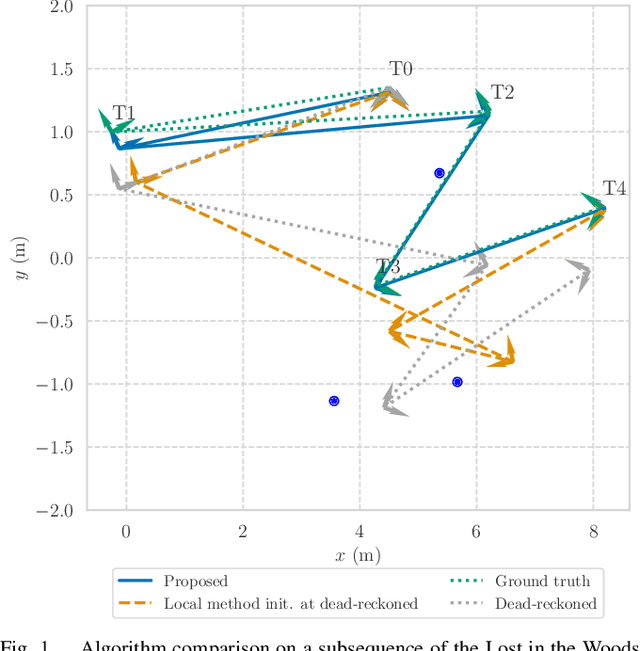
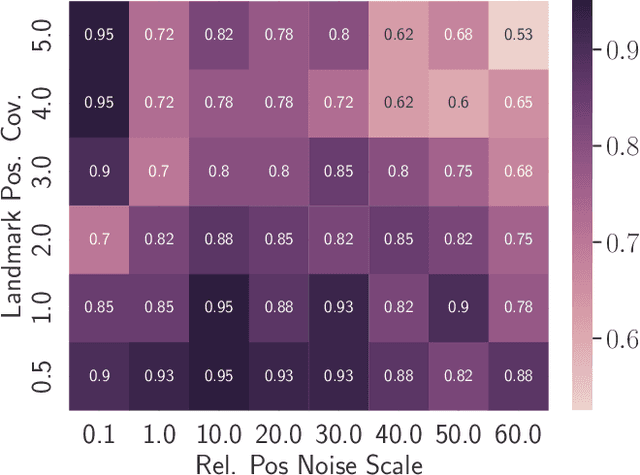
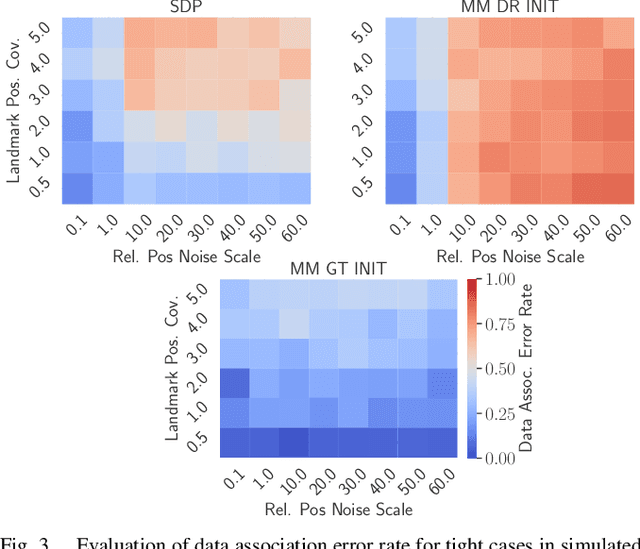
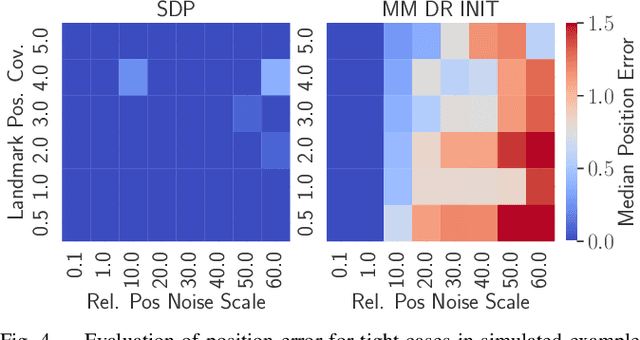
This paper proposes a semidefinite relaxation for landmark-based localization with unknown data associations in planar environments. The proposed method simultaneously solves for the optimal robot states and data associations in a globally optimal fashion. Relative position measurements to known landmarks are used, but the data association is unknown in tha tthe robot does not know which landmark each measurement is generated from. The relaxation is shown to be tight in a majority of cases for moderate noise levels. The proposed algorithm is compared to local Gauss-Newton baselines initialized at the dead-reckoned trajectory, and is shown to significantly improve convergence to the problem's global optimum in simulation and experiment. Accompanying software and supplementary material may be found at https://github.com/vkorotkine/certifiable_uda_loc .