 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty Modelling and Robust Observer Synthesis using the Koopman Operator
Paper and Code
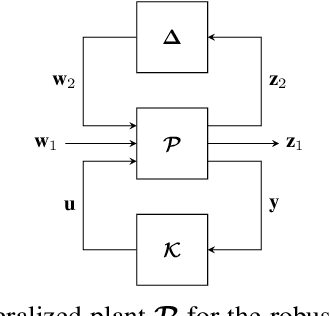
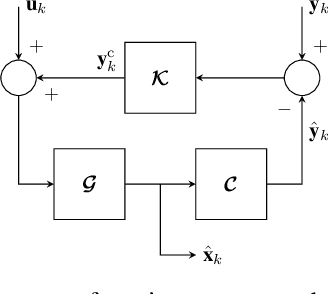

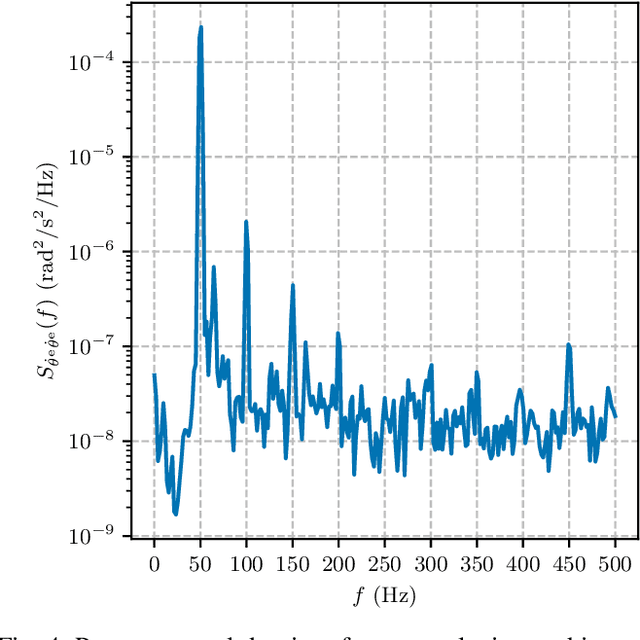
This paper proposes a robust nonlinear observer synthesis method for a population of systems modelled using the Koopman operator. The Koopman operator allows nonlinear systems to be rewritten as infinite-dimensional linear systems. A finite-dimensional approximation of the Koopman operator can be identified directly from data, yielding an approximately linear model of a nonlinear system. The proposed observer synthesis method is made possible by this linearity that in turn allows uncertainty within a population of Koopman models to be quantified in the frequency domain. Using this uncertainty model, linear robust control techniques are used to synthesize robust nonlinear Koopman observers. A population of several dozen motor drives is used to experimentally demonstrate the proposed method. Manufacturing variation is characterized in the frequency domain, and a robust Koopman observer is synthesized using mixed $\mathcal{H}_2$-$\mathcal{H}_\infty$ optimal control.