 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty Modelling and Robust Observer Synthesis using the Koopman Operator
Oct 01, 2024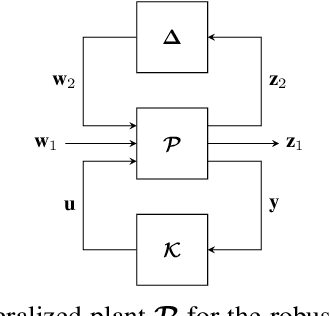

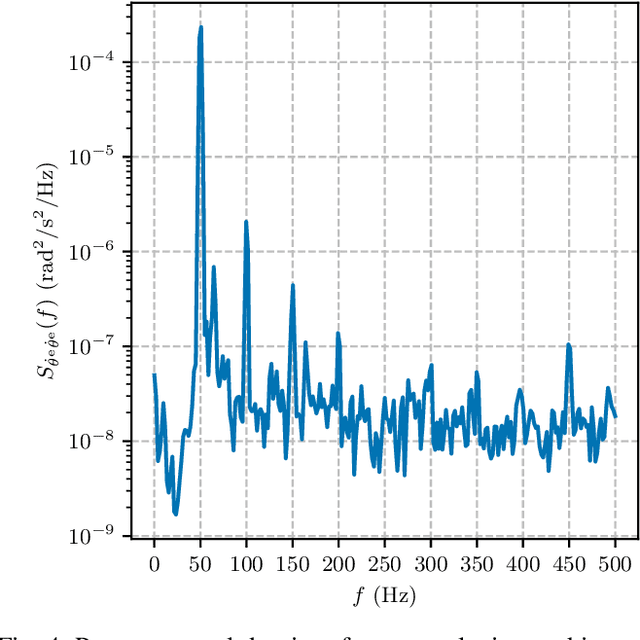
This paper proposes a robust nonlinear observer synthesis method for a population of systems modelled using the Koopman operator. The Koopman operator allows nonlinear systems to be rewritten as infinite-dimensional linear systems. A finite-dimensional approximation of the Koopman operator can be identified directly from data, yielding an approximately linear model of a nonlinear system. The proposed observer synthesis method is made possible by this linearity that in turn allows uncertainty within a population of Koopman models to be quantified in the frequency domain. Using this uncertainty model, linear robust control techniques are used to synthesize robust nonlinear Koopman observers. A population of several dozen motor drives is used to experimentally demonstrate the proposed method. Manufacturing variation is characterized in the frequency domain, and a robust Koopman observer is synthesized using mixed $\mathcal{H}_2$-$\mathcal{H}_\infty$ optimal control.
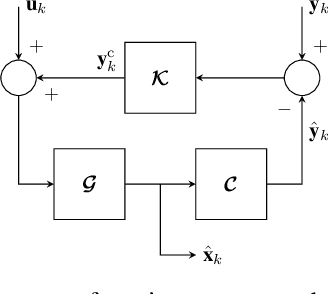
Closed-Loop Koopman Operator Approximation
Mar 27, 2023The Koopman operator allows a nonlinear system to be rewritten as an infinite-dimensional linear system by viewing it in terms of an infinite set of lifting functions instead of a state vector. The main feature of this representation is its linearity, making it compatible with existing linear systems theory. A finite-dimensional approximation of the Koopman operator can be identified from experimental data by choosing a finite subset of lifting functions, applying it to the data, and solving a least squares problem in the lifted space. Existing Koopman operator approximation methods are designed to identify open-loop systems. However, it is impractical or impossible to run experiments on some systems without a feedback controller. Unfortunately, the introduction of feedback control results in correlations between the system's input and output, making some plant dynamics difficult to identify if the controller is neglected. This paper addresses this limitation by introducing a method to identify a Koopman model of the closed-loop system, and then extract a Koopman model of the plant given knowledge of the controller. This is accomplished by leveraging the linearity of the Koopman representation of the system. The proposed approach widens the applicability of Koopman operator identification methods to a broader class of systems. The effectiveness of the proposed closed-loop Koopman operator approximation method is demonstrated experimentally using a Harmonic Drive gearbox exhibiting nonlinear vibrations.
System Norm Regularization Methods for Koopman Operator Approximation
Oct 18, 2021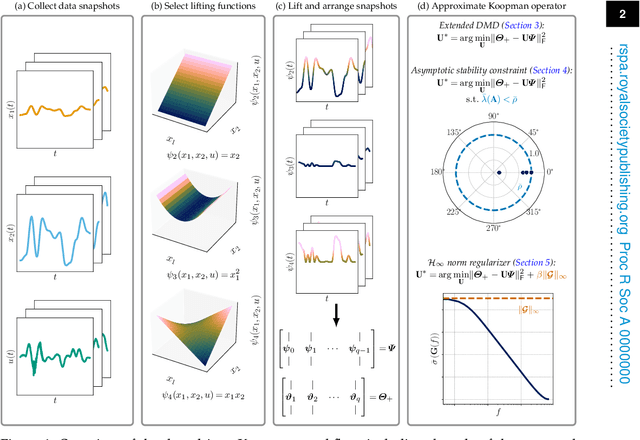
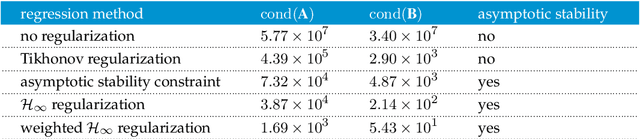
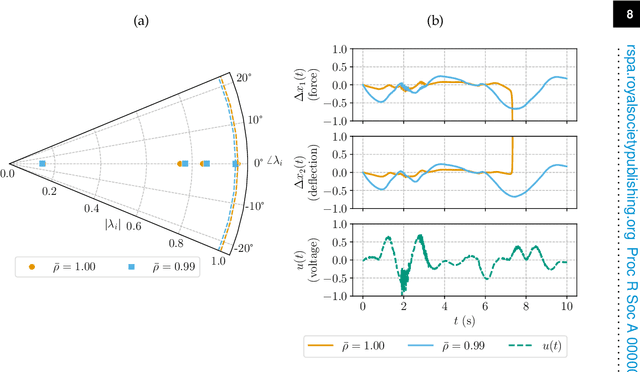
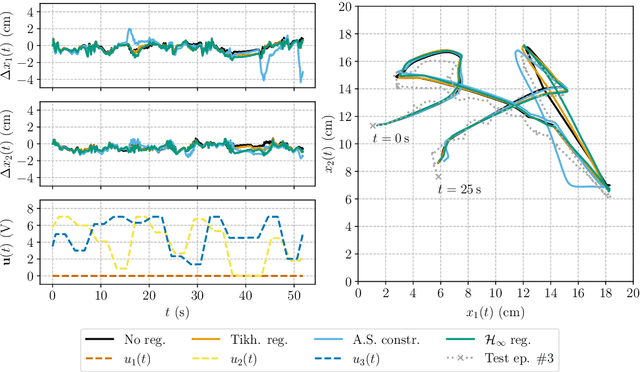
Approximating the Koopman operator from data is numerically challenging when many lifting functions are considered. Even low-dimensional systems can yield unstable or ill-conditioned results in a high-dimensional lifted space. In this paper, Extended DMD and DMD with control, two popular methods for approximating the Koopman operator, are reformulated as convex optimization problems with linear matrix inequality constraints. Both hard asymptotic stability constraints and system norm regularizers are considered as methods to improve the numerical conditioning of the approximate Koopman operator. In particular, the $\mathcal{H}_\infty$ norm is used as a regularizer to penalize the input-output gain of the linear system defined by the Koopman operator. Weighting functions are then applied to penalize the system gain at particular frequencies.
Linear Matrix Inequality Approaches to Koopman Operator Approximation
Feb 06, 2021The regression problem associated with finding a matrix approximation of the Koopman operator from data is considered. The regression problem is formulated as a convex optimization problem subject to linear matrix inequality (LMI) constraints. Doing so allows for additional LMI constraints to be incorporated into the regression problem. In particular, asymptotic stability constraints, regularization using matrix norms, and even regularization using system norms can be easily incorporated into the regression problem.