 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemanticBridge - A Dataset for 3D Semantic Segmentation of Bridges and Domain Gap Analysis
Dec 18, 2025We propose a novel dataset that has been specifically designed for 3D semantic segmentation of bridges and the domain gap analysis caused by varying sensors. This addresses a critical need in the field of infrastructure inspection and maintenance, which is essential for modern society. The dataset comprises high-resolution 3D scans of a diverse range of bridge structures from various countries, with detailed semantic labels provided for each. Our initial objective is to facilitate accurate and automated segmentation of bridge components, thereby advancing the structural health monitoring practice. To evaluate the effectiveness of existing 3D deep learning models on this novel dataset, we conduct a comprehensive analysis of three distinct state-of-the-art architectures. Furthermore, we present data acquired through diverse sensors to quantify the domain gap resulting from sensor variations. Our findings indicate that all architectures demonstrate robust performance on the specified task. However, the domain gap can potentially lead to a decline in the performance of up to 11.4% mIoU.
Impact of color and mixing proportion of synthetic point clouds on semantic segmentation
Dec 26, 2024



Semantic segmentation of point clouds is essential for understanding the built environment, and a large amount of high-quality data is required for training deep learning models. Despite synthetic point clouds (SPC) having the potential to compensate for the shortage of real data, how to exploit the benefits of SPC is still open. Therefore, this study systematically investigates how color and mixing proportion of SPC impact semantic segmentation for the first time. First, a new method to mimic the scanning process and generate SPC based on BIM is proposed, to create a synthetic dataset with consistent colors of BIM (UniSPC) and a synthetic dataset with real colors (RealSPC) respectively. Subsequently, by integrating with the S3DIS dataset, further experiments on PointNet, PointNet++, and DGCNN are conducted. Meanwhile, benchmark experiments and new evaluation metrics are introduced to better evaluate the performance of different models. Experiments show that synthetic color significantly impacts model performance, the performance for common components of the models trained with pure RealSPC is comparable to models with real data, and RealSPC contributes average improvements of 14.1% on overall accuracy and 7.3% on mIoU than UniSPC. Furthermore, the proportion of SPC also has a significant impact on the performance. In mixing training experiments, adding more than 70% SPC achieves an average of 3.9% on overall accuracy and 3.4% on mIoU better than benchmark on three models. It is also revealed that for large flat elements such as floors, ceilings, and walls, the SPC can even replace real point clouds without compromising model performance.
Scan-to-BIM for As-built Roads: Automatic Road Digital Twinning from Semantically Labeled Point Cloud Data
Jun 18, 2024



Creating geometric digital twins (gDT) for as-built roads still faces many challenges, such as low automation level and accuracy, limited asset types and shapes, and reliance on engineering experience. A novel scan-to-building information modeling (scan-to-BIM) framework is proposed for automatic road gDT creation based on semantically labeled point cloud data (PCD), which considers six asset types: Road Surface, Road Side (Slope), Road Lane (Marking), Road Sign, Road Light, and Guardrail. The framework first segments the semantic PCD into spatially independent instances or parts, then extracts the sectional polygon contours as their representative geometric information, stored in JavaScript Object Notation (JSON) files using a new data structure. Primitive gDTs are finally created from JSON files using corresponding conversion algorithms. The proposed method achieves an average distance error of 1.46 centimeters and a processing speed of 6.29 meters per second on six real-world road segments with a total length of 1,200 meters.
Cypher4BIM: Releasing the Power of Graph for Building Knowledge Discovery
May 25, 2024Graph is considered a promising way for managing building information. A new graphic form of IFC (Industry Foundation Classes) data has just been developed, referred to as IFC-Graph. However, understanding of IFC-Graph is insufficient, especially for information query. This study aims to explore graphic building information query and develop a graph query language tailored for IFC-Graph. A series of tasks were carried out, including a) investigating the structure of IFC data and the main types of information in IFC, b) investigating the graph query language Cypher, and c) developing a set of tailored functional query patterns. The developed language is referred to as Cypher4BIM. Five IFC models were used for validation, and the result shows that Cypher4BIM can query individual instances and complex relations from IFC, such as spatial structure, space boundary, and space accessibility. This study contributes to applications that require effective building information query, such as digital twin.
GeoSpark: Sparking up Point Cloud Segmentation with Geometry Clue
Mar 14, 2023Current point cloud segmentation architectures suffer from limited long-range feature modeling, as they mostly rely on aggregating information with local neighborhoods. Furthermore, in order to learn point features at multiple scales, most methods utilize a data-agnostic sampling approach to decrease the number of points after each stage. Such sampling methods, however, often discard points for small objects in the early stages, leading to inadequate feature learning. We believe these issues are can be mitigated by introducing explicit geometry clues as guidance. To this end, we propose GeoSpark, a Plug-in module that incorporates Geometry clues into the network to Spark up feature learning and downsampling. GeoSpark can be easily integrated into various backbones. For feature aggregation, it improves feature modeling by allowing the network to learn from both local points and neighboring geometry partitions, resulting in an enlarged data-tailored receptive field. Additionally, GeoSpark utilizes geometry partition information to guide the downsampling process, where points with unique features are preserved while redundant points are fused, resulting in better preservation of key points throughout the network. We observed consistent improvements after adding GeoSpark to various backbones including PointNet++, KPConv, and PointTransformer. Notably, when integrated with Point Transformer, our GeoSpark module achieves a 74.7% mIoU on the ScanNetv2 dataset (4.1% improvement) and 71.5% mIoU on the S3DIS Area 5 dataset (1.1% improvement), ranking top on both benchmarks. Code and models will be made publicly available.
NHA12D: A New Pavement Crack Dataset and a Comparison Study Of Crack Detection Algorithms
May 02, 2022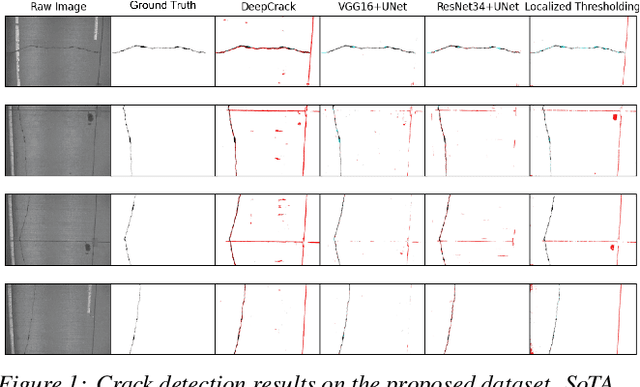
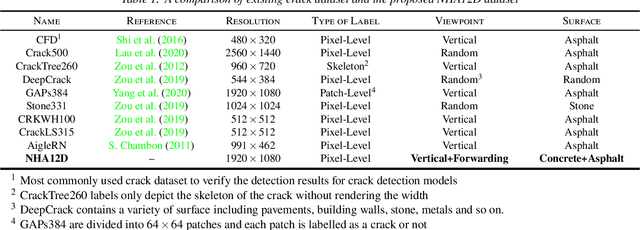
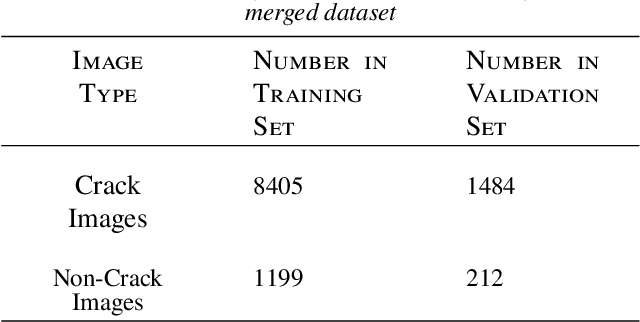

Crack detection plays a key role in automated pavement inspection. Although a large number of algorithms have been developed in recent years to further boost performance, there are still remaining challenges in practice, due to the complexity of pavement images. To further accelerate the development and identify the remaining challenges, this paper conducts a comparison study to evaluate the performance of the state of the art crack detection algorithms quantitatively and objectively. A more comprehensive annotated pavement crack dataset (NHA12D) that contains images with different viewpoints and pavements types is proposed. In the comparison study, crack detection algorithms were trained equally on the largest public crack dataset collected and evaluated on the proposed dataset (NHA12D). Overall, the U-Net model with VGG-16 as backbone has the best all-around performance, but models generally fail to distinguish cracks from concrete joints, leading to a high false-positive rate. It also found that detecting cracks from concrete pavement images still has huge room for improvement. Dataset for concrete pavement images is also missing in the literature. Future directions in this area include filling the gap for concrete pavement images and using domain adaptation techniques to enhance the detection results on unseen datasets.
Geometric Digital Twinning of Industrial Facilities: Retrieval of Industrial Shapes
Feb 10, 2022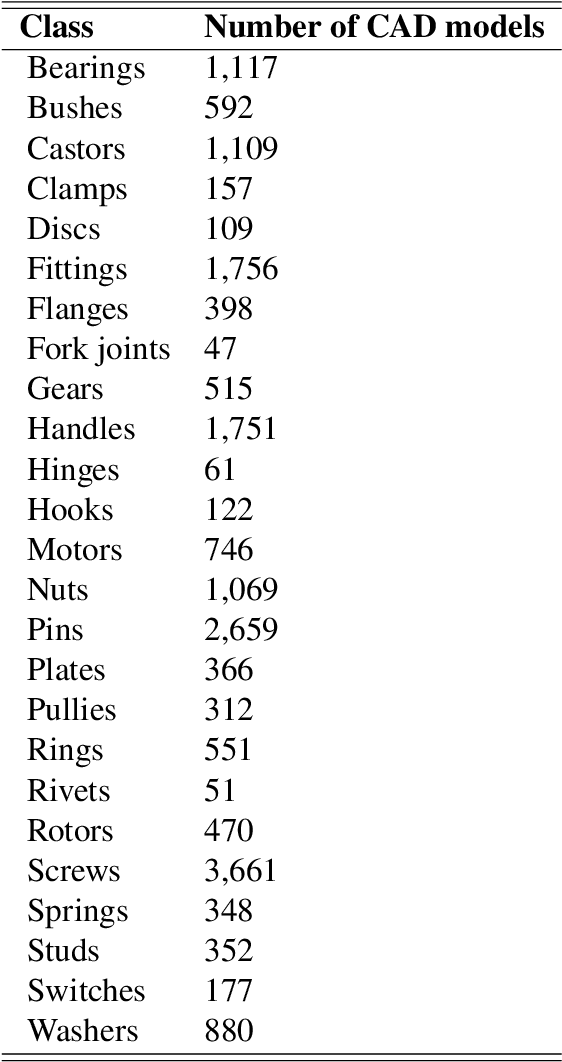
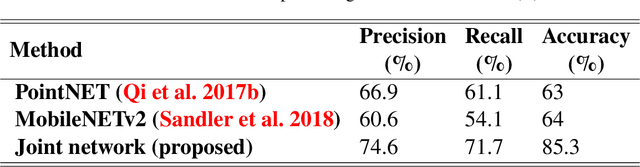
This paper devises, implements and benchmarks a novel shape retrieval method that can accurately match individual labelled point clusters (instances) of existing industrial facilities with their respective CAD models. It employs a combination of image and point cloud deep learning networks to classify and match instances to their geometrically similar CAD model. It extends our previous research on geometric digital twin generation from point cloud data, which currently is a tedious, manual process. Experiments with our joint network reveal that it can reliably retrieve CAD models at 85.2\% accuracy. The proposed research is a fundamental framework to enable the geometric Digital Twin (gDT) pipeline and incorporate the real geometric configuration into the Digital Twin.
CLOI: An Automated Benchmark Framework For Generating Geometric Digital Twins Of Industrial Facilities
Jan 05, 2021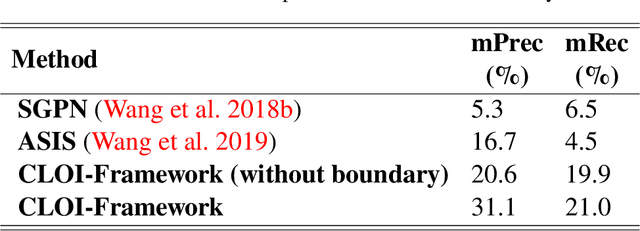
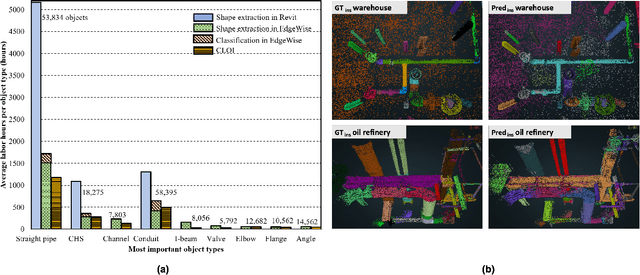
This paper devises, implements and benchmarks a novel framework, named CLOI, that can accurately generate individual labelled point clusters of the most important shapes of existing industrial facilities with minimal manual effort in a generic point-level format. CLOI employs a combination of deep learning and geometric methods to segment the points into classes and individual instances. The current geometric digital twin generation from point cloud data in commercial software is a tedious, manual process. Experiments with our CLOI framework reveal that the method can reliably segment complex and incomplete point clouds of industrial facilities, yielding 82% class segmentation accuracy. Compared to the current state-of-practice, the proposed framework can realize estimated time-savings of 30% on average. CLOI is the first framework of its kind to have achieved geometric digital twinning for the most important objects of industrial factories. It provides the foundation for further research on the generation of semantically enriched digital twins of the built environment.
Instance Segmentation of Industrial Point Cloud Data
Dec 24, 2020
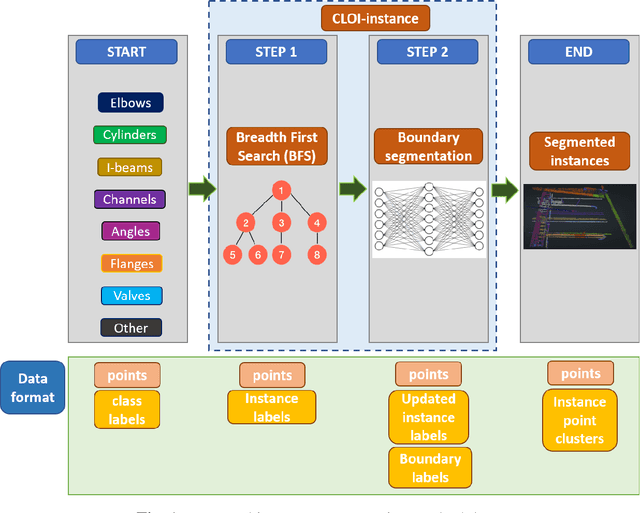

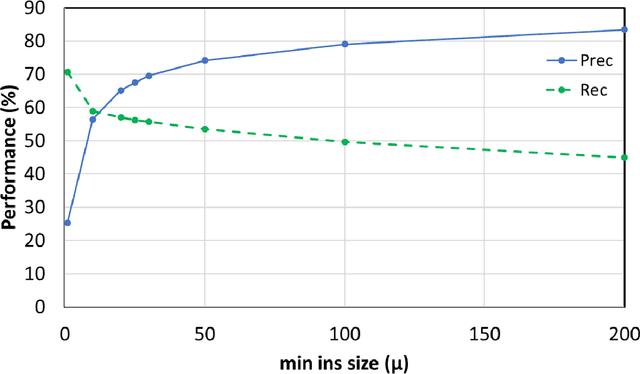
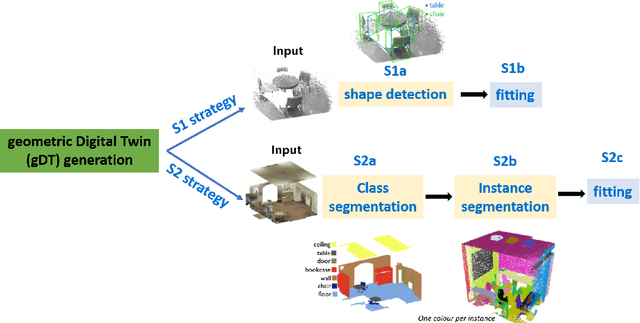
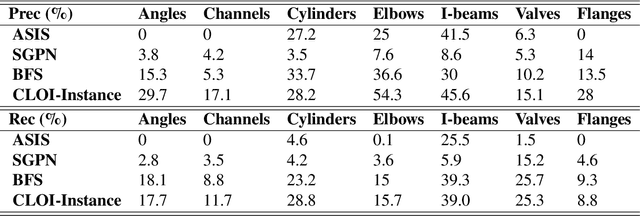
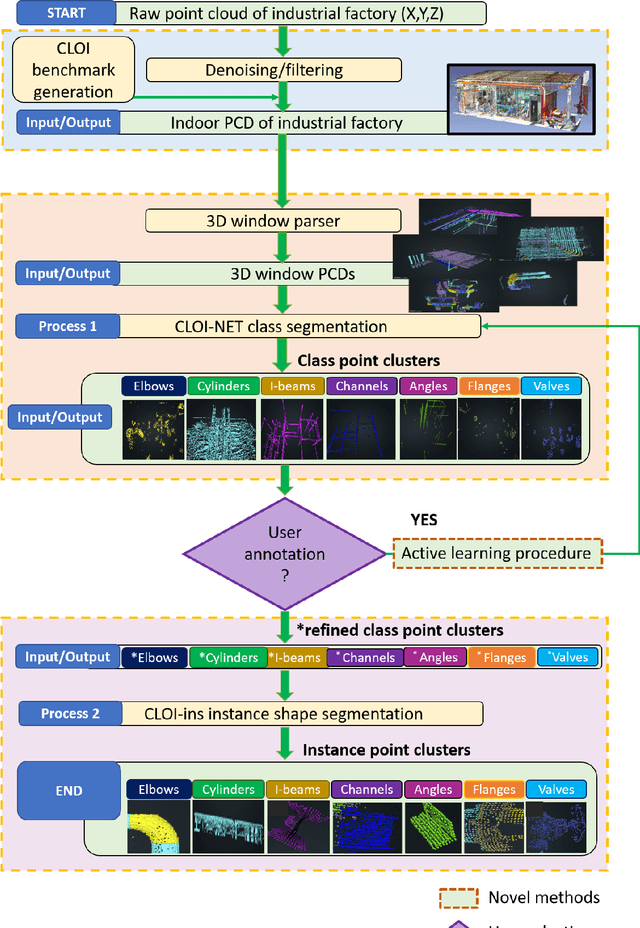
The challenge that this paper addresses is how to efficiently minimize the cost and manual labour for automatically generating object oriented geometric Digital Twins (gDTs) of industrial facilities, so that the benefits provide even more value compared to the initial investment to generate these models. Our previous work achieved the current state-of-the-art class segmentation performance (75% average accuracy per point and average AUC 90% in the CLOI dataset classes) as presented in (Agapaki and Brilakis 2020) and directly produces labelled point clusters of the most important to model objects (CLOI classes) from laser scanned industrial data. CLOI stands for C-shapes, L-shapes, O-shapes, I-shapes and their combinations. However, the problem of automated segmentation of individual instances that can then be used to fit geometric shapes remains unsolved. We argue that the use of instance segmentation algorithms has the theoretical potential to provide the output needed for the generation of gDTs. We solve instance segmentation in this paper through (a) using a CLOI-Instance graph connectivity algorithm that segments the point clusters of an object class into instances and (b) boundary segmentation of points that improves step (a). Our method was tested on the CLOI benchmark dataset (Agapaki et al. 2019) and segmented instances with 76.25% average precision and 70% average recall per point among all classes. This proved that it is the first to automatically segment industrial point cloud shapes with no prior knowledge other than the class point label and is the bedrock for efficient gDT generation in cluttered industrial point clouds.