 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMachine Learning Methods for Studying Latent Neural Activity Dynamics
Jun 09, 2026Recent developments in brain recording are driving a demand for machine learning tools capable of decoding the latent structure of large populations of neurons. In this paper, we provide a comprehensive survey that outlines the trajectory of Latent Variable Models (LVMs) from early state-space models to more recent deep generative models. We organize the literature into three closely related domains: (1) Single-Region Latent Dynamics, which includes models such as linear dynamical systems to more complex dynamics represented by Recurrent Neural Networks (RNNs) and Neural Ordinary Differential Equations (ODEs); (2) Multi-Region Communication, which employs probabilistic as well as subspace methods to study how information is transferred across different brain areas considering synaptic propagation delays and network connectivity; and (3) Behavior-Aligned Modeling, which seeks to disentangle neural activity related to task performance from other internal states via supervised or contrastive learning. This survey also includes large-scale neural foundation models, such as Transformers and diffusion models, that rely on large-scale pre-training for optimal performance across subjects. Finally, we conclude and discuss benchmarks, evaluation criteria, and open challenges, such as the ability to identify causal links or directionality of communication, to facilitate future research for bridging interpretable brain dynamics with reliable neural decoding.
Flash-WAM: Modality-Aware Distillation for World Action Models
Jun 03, 2026World-action models (WAMs) jointly generate future video and robot actions through iterative diffusion, achieving strong performance on manipulation benchmarks but requiring tens of denoising steps, a cost that precludes real-time control. Step distillation has emerged as the natural remedy, but off-the-shelf methods break down in the joint video-action setting because video and action streams use different SNR-shifted noise schedules and reach training with substantially different marginal noise distributions, an asymmetry that single-modality distillation methods cannot accommodate. We introduce \textbf{Flash-WAM}, a modality-aware step-distillation framework inspired by consistency distillation that selects the consistency function for each modality to match its noise regime: a linear-gradient-scaling parametrization for the action stream's low-noise regime, paired with a variance-preserving parametrization for the video stream's high-noise regime, grounded in a structural analysis of the consistency-function family that characterizes the achievable gradient scaling under the consistency boundary condition. Instantiated on LingBot-VA, Flash-WAM compresses inference to a single step in each modality. On RoboTwin 2.0, this reduces per-chunk latency from $8.1$ seconds to $348$ ms on NVIDIA L40S, a $23{\times}$ speedup that enables real-time inference. Flash-WAM preserves task success on simulation benchmarks ($85.5\%$ RoboTwin 2.0, $95.7\%$ LIBERO) and substantially recovers real-world performance ($60\%$ average on a Unitree G1 humanoid robot), while naive consistency distillation drops to $24\%$ at the same step budget.
PhyWorld: Physics-Faithful World Model for Video Generation
May 19, 2026World simulators can provide safe and scalable environments for training Physical AI systems before real-world deployment. Large video generation models are emerging as a promising basis for such simulators because they can generate diverse and realistic visual futures. However, using them as world simulators requires physically faithful video continuations, namely, generated videos that preserve the physical state implied by the conditioning input, and evolve in ways consistent with basic physical principles. We propose PhyWorld, a video generation world model designed to produce temporally coherent and physically faithful scene continuations through two-stage post-training. In the first stage, we improve video-to-video continuation with flow matching fine-tuning, encouraging stable visual attributes and coherent motion dynamics across frames. In the second stage, we align generated dynamics with physical principles using Direct Preference Optimization (DPO) over physics preference pairs, guiding the model toward outputs with higher physical plausibility. To evaluate PhyWorld, we use both standard video-quality benchmarks and a dedicated physical-faithfulness benchmark with per-law scoring. Experiments show that PhyWorld improves video consistency, achieving an average score of 0.769 on VBench compared with 0.756 or below for state-of-the-art baselines. PhyWorld also improves physical plausibility, reaching an average score of 3.09 on our physical-faithfulness benchmark compared with 2.99 for the strongest baseline. These results suggest that post-training large video generation models with continuation and physics-preference signals can make them more effective world simulators for Physical AI.
Sensing Framework Design and Performance Optimization with Action Detection for ISCC
May 05, 2025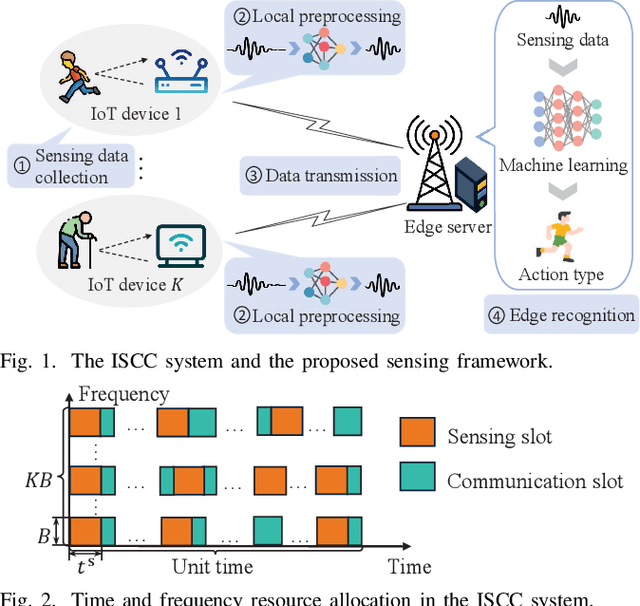
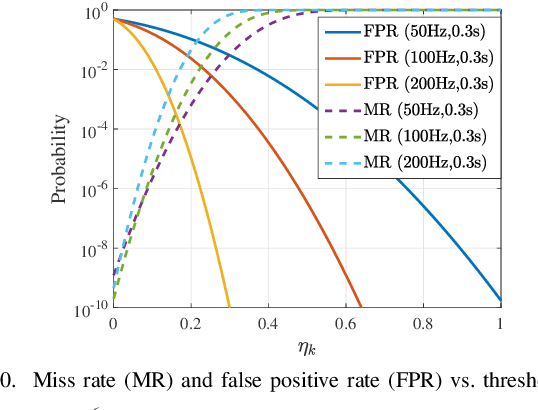
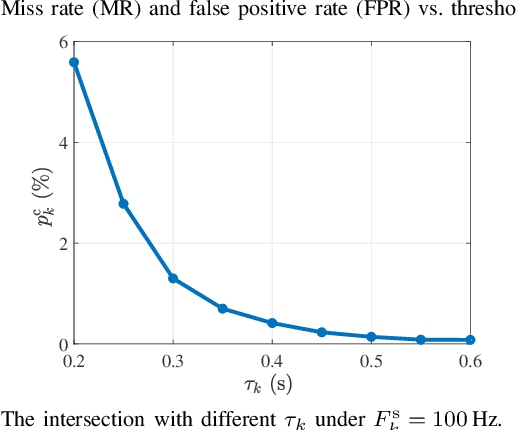
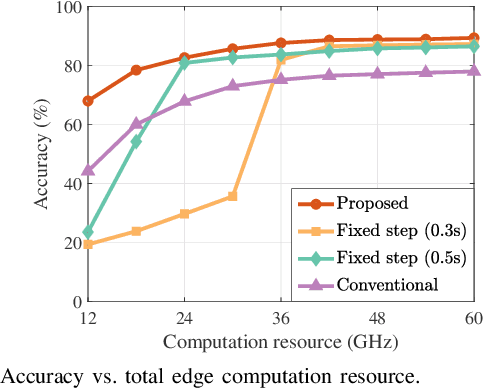
Integrated sensing, communication, and computation (ISCC) has been regarded as a prospective technology for the next-generation wireless network, supporting humancentric intelligent applications. However, the delay sensitivity of these computation-intensive applications, especially in a multidevice ISCC system with limited resources, highlights the urgent need for efficient sensing task execution frameworks. To address this, we propose a resource-efficient sensing framework in this paper. Different from existing solutions, it features a novel action detection module deployed at each device to detect the onset of an action. Only time windows filled with signals of interest are offloaded to the edge server and processed by the edge recognition module, thus reducing overhead. Furthermore, we quantitatively analyze the sensing performance of the proposed sensing framework and formulate a sensing accuracy maximization problem under power, delay, and resource limitations for the multi-device ISCC system. By decomposing it into two subproblems, we develop an alternating direction method of multipliers (ADMM)-based distributed algorithm. It alternatively solves a sensing accuracy maximization subproblem at each device and employs a closed-form computation resource allocation strategy at the edge server till convergence. Finally, a real-world test is conducted using commodity wireless devices to validate the sensing performance analysis. Extensive test results demonstrate that our proposal achieves higher sensing accuracy under the limited resource compared to two baselines.
NHA12D: A New Pavement Crack Dataset and a Comparison Study Of Crack Detection Algorithms
May 02, 2022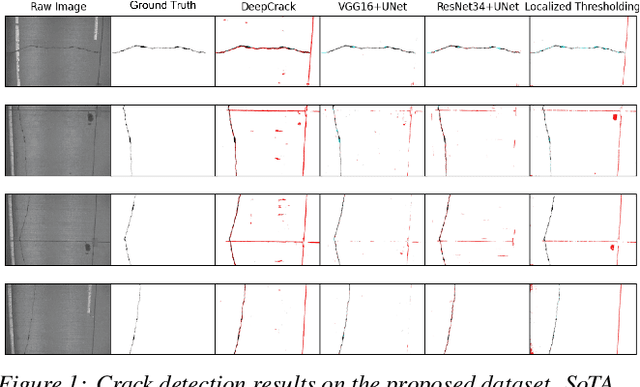
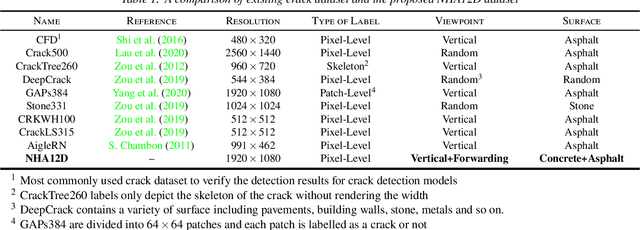
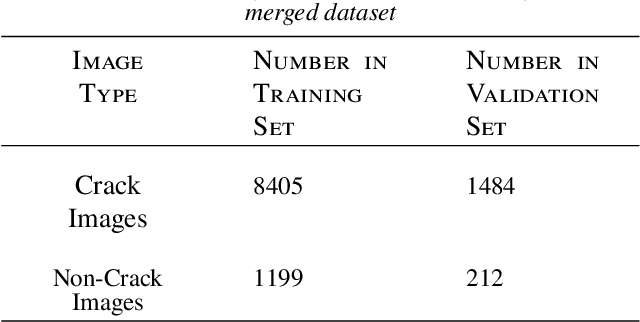

Crack detection plays a key role in automated pavement inspection. Although a large number of algorithms have been developed in recent years to further boost performance, there are still remaining challenges in practice, due to the complexity of pavement images. To further accelerate the development and identify the remaining challenges, this paper conducts a comparison study to evaluate the performance of the state of the art crack detection algorithms quantitatively and objectively. A more comprehensive annotated pavement crack dataset (NHA12D) that contains images with different viewpoints and pavements types is proposed. In the comparison study, crack detection algorithms were trained equally on the largest public crack dataset collected and evaluated on the proposed dataset (NHA12D). Overall, the U-Net model with VGG-16 as backbone has the best all-around performance, but models generally fail to distinguish cracks from concrete joints, leading to a high false-positive rate. It also found that detecting cracks from concrete pavement images still has huge room for improvement. Dataset for concrete pavement images is also missing in the literature. Future directions in this area include filling the gap for concrete pavement images and using domain adaptation techniques to enhance the detection results on unseen datasets.
Partial Symbol Recovery for Interference Resilience in Low-Power Wide Area Networks
Sep 08, 2021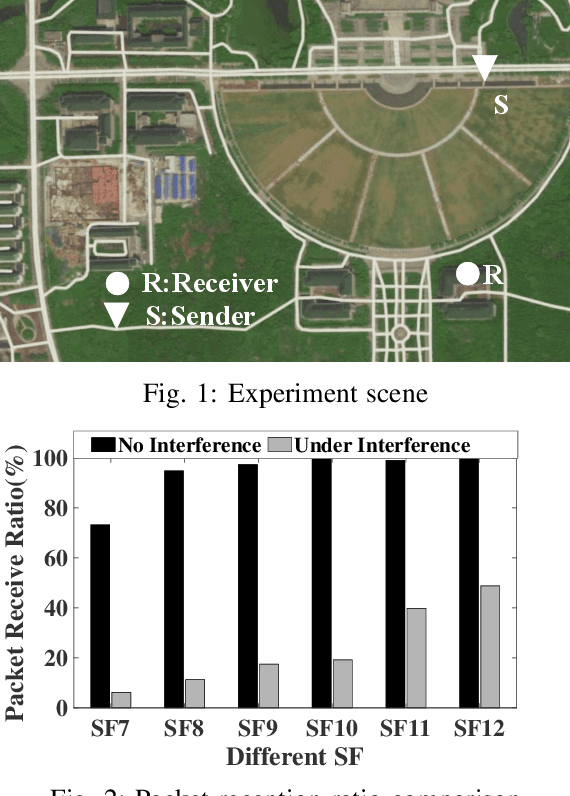
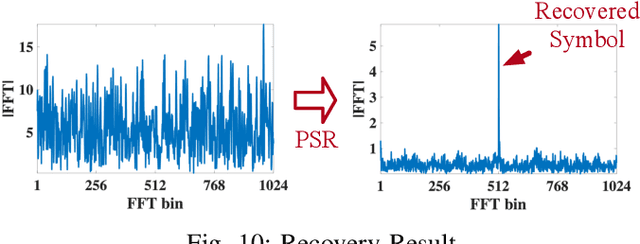
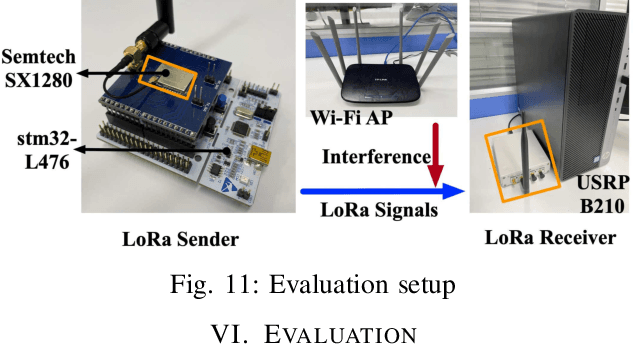
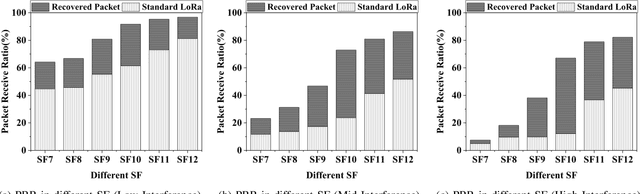
Recent years have witnessed the proliferation of Low-power Wide Area Networks (LPWANs) in the unlicensed band for various Internet-of-Things (IoT) applications. Due to the ultra-low transmission power and long transmission duration, LPWAN devices inevitably suffer from high power Cross Technology Interference (CTI), such as interference from Wi-Fi, coexisting in the same spectrum. To alleviate this issue, this paper introduces the Partial Symbol Recovery (PSR) scheme for improving the CTI resilience of LPWAN. We verify our idea on LoRa, a widely adopted LPWAN technique, as a proof of concept. At the PHY layer, although CTI has much higher power, its duration is relatively shorter compared with LoRa symbols, leaving part of a LoRa symbol uncorrupted. Moreover, due to its high redundancy, LoRa chips within a symbol are highly correlated. This opens the possibility of detecting a LoRa symbol with only part of the chips. By examining the unique frequency patterns in LoRa symbols with time-frequency analysis, our design effectively detects the clean LoRa chips that are free of CTI. This enables PSR to only rely on clean LoRa chips for successfully recovering from communication failures. We evaluate our PSR design with real-world testbeds, including SX1280 LoRa chips and USRP B210, under Wi-Fi interference in various scenarios. Extensive experiments demonstrate that our design offers reliable packet recovery performance, successfully boosting the LoRa packet reception ratio from 45.2% to 82.2% with a performance gain of 1.8 times.
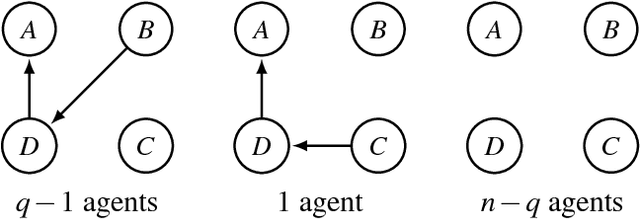
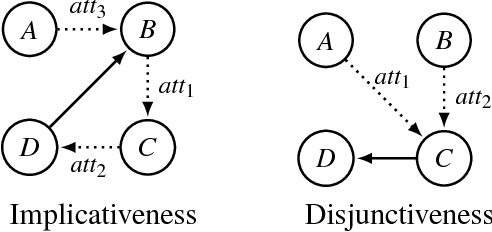
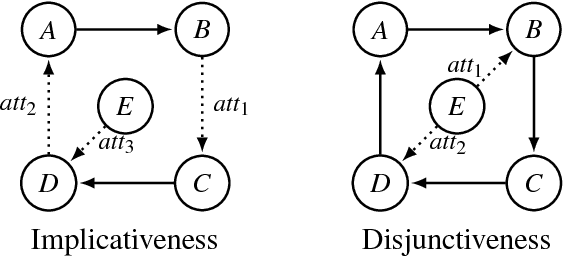
Collective Argumentation: The Case of Aggregating Support-Relations of Bipolar Argumentation Frameworks
Jun 22, 2021
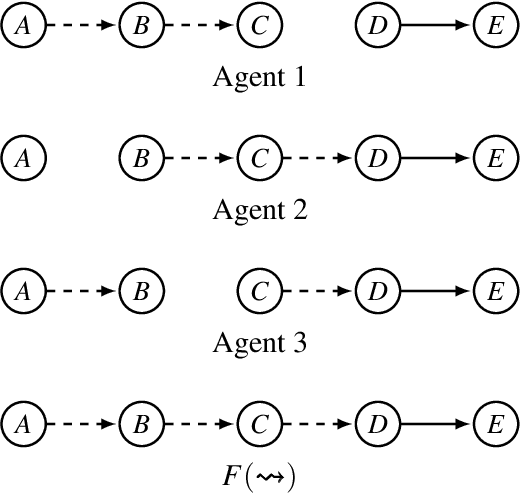
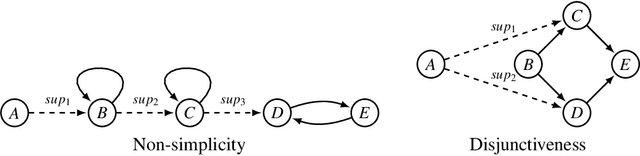
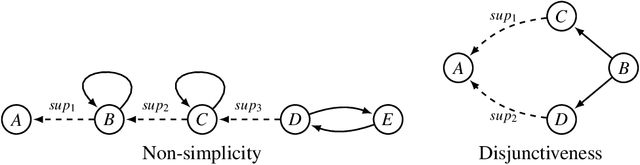
In many real-life situations that involve exchanges of arguments, individuals may differ on their assessment of which supports between the arguments are in fact justified, i.e., they put forward different support-relations. When confronted with such situations, we may wish to aggregate individuals' argumentation views on support-relations into a collective view, which is acceptable to the group. In this paper, we assume that under bipolar argumentation frameworks, individuals are equipped with a set of arguments and a set of attacks between arguments, but with possibly different support-relations. Using the methodology in social choice theory, we analyze what semantic properties of bipolar argumentation frameworks can be preserved by aggregation rules during the aggregation of support-relations.
* In Proceedings TARK 2021, arXiv:2106.10886. Accepted by the 18th conference on theoretical aspects of rationality and knowledge (TARK-2021)
Continuous Transition: Improving Sample Efficiency for Continuous Control Problems via MixUp
Nov 30, 2020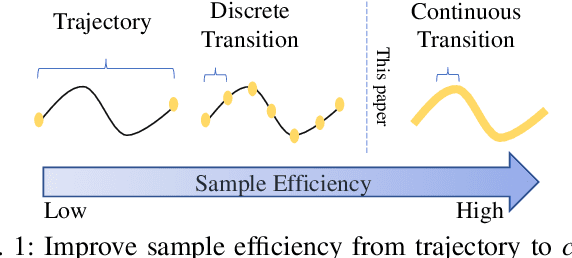
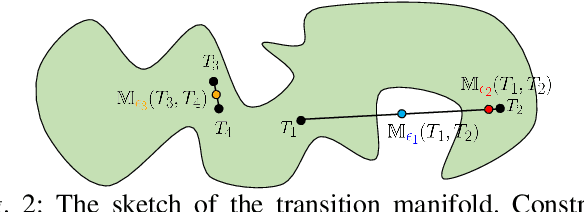
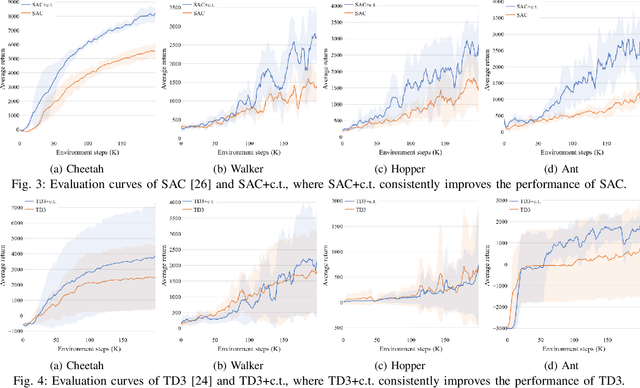
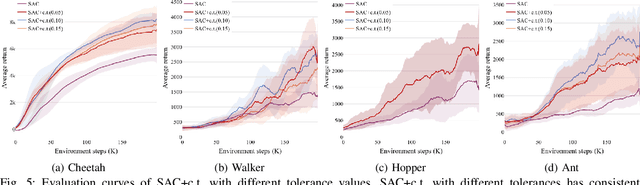
Although deep reinforcement learning~(RL) has been successfully applied to a variety of robotic control tasks, it's still challenging to apply it to real-world tasks, due to the poor sample efficiency. Attempting to overcome this shortcoming, several works focus on reusing the collected trajectory data during the training by decomposing them into a set of policy-irrelevant discrete transitions. However, their improvements are somewhat marginal since i) the amount of the transitions is usually small, and ii) the value assignment only happens in the joint states. To address these issues, this paper introduces a concise yet powerful method to construct \textit{Continuous Transition}, which exploits the trajectory information by exploiting the potential transitions along the trajectory. Specifically, we propose to synthesize new transitions for training by linearly interpolating the conjunctive transitions. To keep the constructed transitions authentic, we also develop a discriminator to guide the construction process automatically. Extensive experiments demonstrate that our proposed method achieves a significant improvement in sample efficiency on various complex continuous robotic control problems in MuJoCo and outperforms the advanced model-based / model-free RL methods.
Preservation of Semantic Properties during the Aggregation of Abstract Argumentation Frameworks
Jul 27, 2017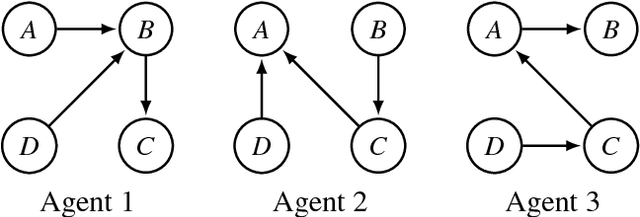
An abstract argumentation framework can be used to model the argumentative stance of an agent at a high level of abstraction, by indicating for every pair of arguments that is being considered in a debate whether the first attacks the second. When modelling a group of agents engaged in a debate, we may wish to aggregate their individual argumentation frameworks to obtain a single such framework that reflects the consensus of the group. Even when agents disagree on many details, there may well be high-level agreement on important semantic properties, such as the acceptability of a given argument. Using techniques from social choice theory, we analyse under what circumstances such semantic properties agreed upon by the individual agents can be preserved under aggregation.
* In Proceedings TARK 2017, arXiv:1707.08250