 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFashionStylist: An Expert Knowledge-enhanced Multimodal Dataset for Fashion Understanding
Apr 13, 2026Fashion understanding requires both visual perception and expert-level reasoning about style, occasion, compatibility, and outfit rationale. However, existing fashion datasets remain fragmented and task-specific, often focusing on item attributes, outfit co-occurrence, or weak textual supervision, and thus provide limited support for holistic outfit understanding. In this paper, we introduce FashionStylist, an expert-annotated benchmark for holistic and expert-level fashion understanding. Constructed through a dedicated fashion-expert annotation pipeline, FashionStylist provides professionally grounded annotations at both the item and outfit levels. It supports three representative tasks: outfit-to-item grounding, outfit completion, and outfit evaluation. These tasks cover realistic item recovery from complex outfits with layering and accessories, compatibility-aware composition beyond co-occurrence matching, and expert-level assessment of style, season, occasion, and overall coherence. Experimental results show that FashionStylist serves not only as a unified benchmark for multiple fashion tasks, but also as an effective training resource for improving grounding, completion, and outfit-level semantic evaluation in MLLM-based fashion systems.
Through Their Eyes: Fixation-aligned Tuning for Personalized User Emulation
Apr 10, 2026Large language model (LLM) agents are increasingly deployed as scalable user simulators for recommender system evaluation. Yet existing simulators perceive recommendations through text or structured metadata rather than the visual interfaces real users browse-a critical gap, since attention over recommendation layouts is both visually driven and highly personalized. We investigate whether aligning a vision-language model's (VLM's) visual attention with user-specific gaze patterns can improve simulation fidelity. Analysis of a real-world eye-tracking dataset collected in a carousel-based recommendation setting reveals that users exhibit stable individual gaze patterns strongly predictive of click behavior. Building on this finding, we propose Fixation-Aligned Tuning for user Emulation (FixATE). Our approach first probes the VLM's internal visual attention via interpretability operators to obtain a slot-level relevance distribution comparable with human fixation, and then learns personalized soft prompts to steer the model's attention toward each user's characteristic fixation pattern. Experiments across three interpretability-based probing operators and two architecturally distinct VLM backbones demonstrate consistent improvements in both attention alignment and click prediction accuracy. These results suggest that making the model "see like the user" is a viable path toward simulators that more faithfully reproduce how users perceive and act in recommendation interfaces.
Think When Needed: Model-Aware Reasoning Routing for LLM-based Ranking
Jan 26, 2026Large language models (LLMs) are increasingly applied to ranking tasks in retrieval and recommendation. Although reasoning prompting can enhance ranking utility, our preliminary exploration reveals that its benefits are inconsistent and come at a substantial computational cost, suggesting that when to reason is as crucial as how to reason. To address this issue, we propose a reasoning routing framework that employs a lightweight, plug-and-play router head to decide whether to use direct inference (Non-Think) or reasoning (Think) for each instance before generation. The router head relies solely on pre-generation signals: i) compact ranking-aware features (e.g., candidate dispersion) and ii) model-aware difficulty signals derived from a diagnostic checklist reflecting the model's estimated need for reasoning. By leveraging these features before generation, the router outputs a controllable token that determines whether to apply the Think mode. Furthermore, the router can adaptively select its operating policy along the validation Pareto frontier during deployment, enabling dynamic allocation of computational resources toward instances most likely to benefit from Think under varying system constraints. Experiments on three public ranking datasets with different scales of open-source LLMs show consistent improvements in ranking utility with reduced token consumption (e.g., +6.3\% NDCG@10 with -49.5\% tokens on MovieLens with Qwen3-4B), demonstrating reasoning routing as a practical solution to the accuracy-efficiency trade-off.
MMGRid: Navigating Temporal-aware and Cross-domain Generative Recommendation via Model Merging
Jan 22, 2026Model merging (MM) offers an efficient mechanism for integrating multiple specialized models without access to original training data or costly retraining. While MM has demonstrated success in domains like computer vision, its role in recommender systems (RSs) remains largely unexplored. Recently, Generative Recommendation (GR) has emerged as a new paradigm in RSs, characterized by rapidly growing model scales and substantial computational costs, making MM particularly appealing for cost-sensitive deployment scenarios. In this work, we present the first systematic study of MM in GR through a contextual lens. We focus on a fundamental yet underexplored challenge in real-world: how to merge generative recommenders specialized to different real-world contexts, arising from temporal evolving user behaviors and heterogeneous application domains. To this end, we propose a unified framework MMGRid, a structured contextual grid of GR checkpoints that organizes models trained under diverse contexts induced by temporal evolution and domain diversity. All checkpoints are derived from a shared base LLM but fine-tuned on context-specific data, forming a realistic and controlled model space for systematically analyzing MM across GR paradigms and merging algorithms. Our investigation reveals several key insights. First, training GR models from LLMs can introduce parameter conflicts during merging due to token distribution shifts and objective disparities; such conflicts can be alleviated by disentangling task-aware and context-specific parameter changes via base model replacement. Second, incremental training across contexts induces recency bias, which can be effectively balanced through weighted contextual merging. Notably, we observe that optimal merging weights correlate with context-dependent interaction characteristics, offering practical guidance for weight selection in real-world deployments.
Advanced Tool for Traffic Crash Analysis: An AI-Driven Multi-Agent Approach to Pre-Crash Reconstruction
Nov 13, 2025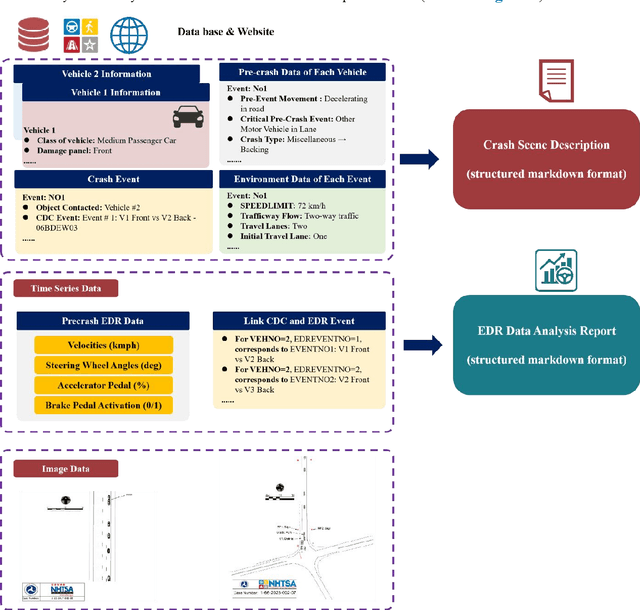
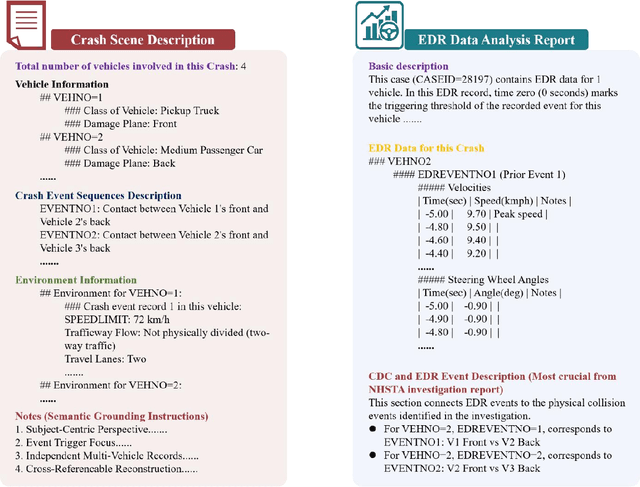
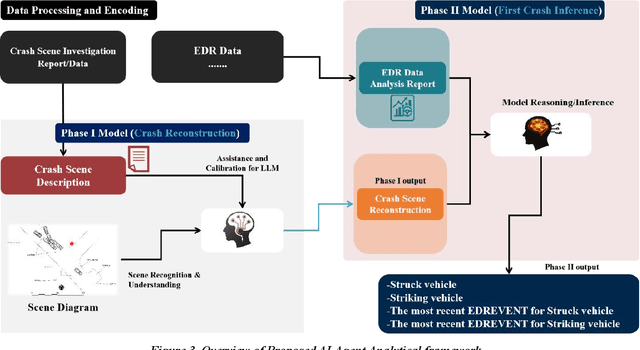

Traffic collision reconstruction traditionally relies on human expertise, often yielding inconsistent results when analyzing incomplete multimodal data. This study develops a multi-agent AI framework that reconstructs pre-crash scenarios and infers vehicle behaviors from fragmented collision data. We present a two-phase collaborative framework combining reconstruction and reasoning phases. The system processes 277 rear-end lead vehicle deceleration (LVD) collisions from the Crash Investigation Sampling System, integrating textual crash reports, structured tabular data, and visual scene diagrams. Phase I generates natural-language crash reconstructions from multimodal inputs. Phase II performs in-depth crash reasoning by combining these reconstructions with temporal Event Data Recorder (EDR).For validation, we applied it to all LVD cases, focusing on a subset of 39 complex crashes where multiple EDR records per collision introduced ambiguity (e.g., due to missing or conflicting data).The evaluation of the 39 LVD crash cases revealed our framework achieved perfect accuracy across all test cases, successfully identifying both the most relevant EDR event and correctly distinguishing striking versus struck vehicles, surpassing the 92% accuracy achieved by human researchers on the same challenging dataset. The system maintained robust performance even when processing incomplete data, including missing or erroneous EDR records and ambiguous scene diagrams. This study demonstrates superior AI capabilities in processing heterogeneous collision data, providing unprecedented precision in reconstructing impact dynamics and characterizing pre-crash behaviors.
Mirroring Users: Towards Building Preference-aligned User Simulator with User Feedback in Recommendation
Aug 25, 2025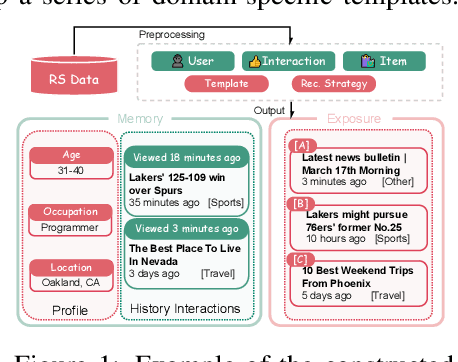
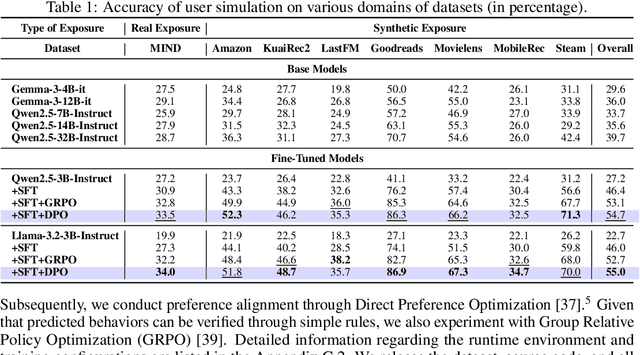
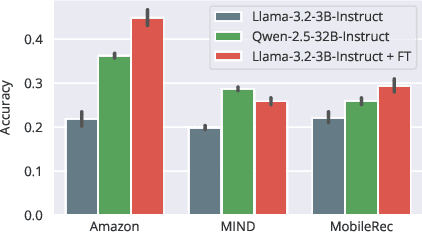
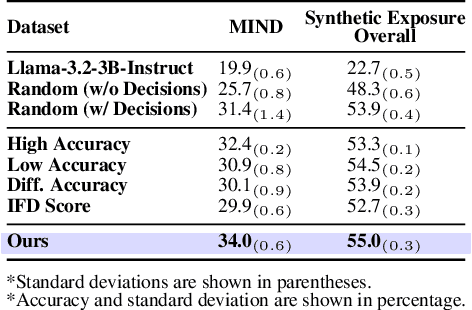
User simulation is increasingly vital to develop and evaluate recommender systems (RSs). While Large Language Models (LLMs) offer promising avenues to simulate user behavior, they often struggle with the absence of specific domain alignment required for RSs and the efficiency demands of large-scale simulation. A vast yet underutilized resource for enhancing this alignment is the extensive user feedback inherent in RSs. However, directly leveraging such feedback presents two significant challenges. First, user feedback in RSs is often ambiguous and noisy, which negatively impacts effective preference alignment. Second, the massive volume of feedback largely hinders the efficiency of preference alignment, necessitating an efficient filtering mechanism to identify more informative samples. To overcome these hurdles, we introduce a novel data construction framework that leverages user feedback in RSs with advanced LLM capabilities to generate high-quality simulation data. Our framework unfolds in two key phases: (1) employing LLMs to generate cognitive decision-making processes on constructed simulation samples, reducing ambiguity in raw user feedback; (2) data distillation based on uncertainty estimation and behavior sampling to filter challenging yet denoised simulation samples. Accordingly, we fine-tune lightweight LLMs, as user simulators, using such high-quality dataset with corresponding decision-making processes. Extensive experiments verify that our framework significantly boosts the alignment with human preferences and in-domain reasoning capabilities of fine-tuned LLMs, and provides more insightful and interpretable signals when interacting with RSs. We believe our work will advance the RS community and offer valuable insights for broader human-centric AI research.
LightKG: Efficient Knowledge-Aware Recommendations with Simplified GNN Architecture
Jun 12, 2025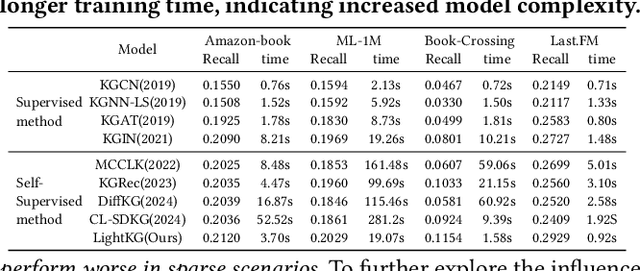

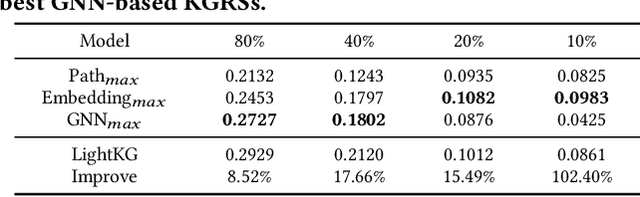
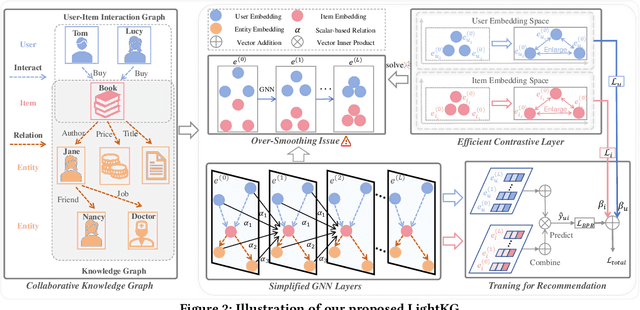
Recently, Graph Neural Networks (GNNs) have become the dominant approach for Knowledge Graph-aware Recommender Systems (KGRSs) due to their proven effectiveness. Building upon GNN-based KGRSs, Self-Supervised Learning (SSL) has been incorporated to address the sparity issue, leading to longer training time. However, through extensive experiments, we reveal that: (1)compared to other KGRSs, the existing GNN-based KGRSs fail to keep their superior performance under sparse interactions even with SSL. (2) More complex models tend to perform worse in sparse interaction scenarios and complex mechanisms, like attention mechanism, can be detrimental as they often increase learning difficulty. Inspired by these findings, we propose LightKG, a simple yet powerful GNN-based KGRS to address sparsity issues. LightKG includes a simplified GNN layer that encodes directed relations as scalar pairs rather than dense embeddings and employs a linear aggregation framework, greatly reducing the complexity of GNNs. Additionally, LightKG incorporates an efficient contrastive layer to implement SSL. It directly minimizes the node similarity in original graph, avoiding the time-consuming subgraph generation and comparison required in previous SSL methods. Experiments on four benchmark datasets show that LightKG outperforms 12 competitive KGRSs in both sparse and dense scenarios while significantly reducing training time. Specifically, it surpasses the best baselines by an average of 5.8\% in recommendation accuracy and saves 84.3\% of training time compared to KGRSs with SSL. Our code is available at https://github.com/1371149/LightKG.
Enhancing New-item Fairness in Dynamic Recommender Systems
Apr 30, 2025New-items play a crucial role in recommender systems (RSs) for delivering fresh and engaging user experiences. However, traditional methods struggle to effectively recommend new-items due to their short exposure time and limited interaction records, especially in dynamic recommender systems (DRSs) where new-items get continuously introduced and users' preferences evolve over time. This leads to significant unfairness towards new-items, which could accumulate over the successive model updates, ultimately compromising the stability of the entire system. Therefore, we propose FairAgent, a reinforcement learning (RL)-based new-item fairness enhancement framework specifically designed for DRSs. It leverages knowledge distillation to extract collaborative signals from traditional models, retaining strong recommendation capabilities for old-items. In addition, FairAgent introduces a novel reward mechanism for recommendation tailored to the characteristics of DRSs, which consists of three components: 1) a new-item exploration reward to promote the exposure of dynamically introduced new-items, 2) a fairness reward to adapt to users' personalized fairness requirements for new-items, and 3) an accuracy reward which leverages users' dynamic feedback to enhance recommendation accuracy. Extensive experiments on three public datasets and backbone models demonstrate the superior performance of FairAgent. The results present that FairAgent can effectively boost new-item exposure, achieve personalized new-item fairness, while maintaining high recommendation accuracy.
FairRec: Fairness Testing for Deep Recommender Systems
Apr 14, 2023



Deep learning-based recommender systems (DRSs) are increasingly and widely deployed in the industry, which brings significant convenience to people's daily life in different ways. However, recommender systems are also shown to suffer from multiple issues,e.g., the echo chamber and the Matthew effect, of which the notation of "fairness" plays a core role.While many fairness notations and corresponding fairness testing approaches have been developed for traditional deep classification models, they are essentially hardly applicable to DRSs. One major difficulty is that there still lacks a systematic understanding and mapping between the existing fairness notations and the diverse testing requirements for deep recommender systems, not to mention further testing or debugging activities. To address the gap, we propose FairRec, a unified framework that supports fairness testing of DRSs from multiple customized perspectives, e.g., model utility, item diversity, item popularity, etc. We also propose a novel, efficient search-based testing approach to tackle the new challenge, i.e., double-ended discrete particle swarm optimization (DPSO) algorithm, to effectively search for hidden fairness issues in the form of certain disadvantaged groups from a vast number of candidate groups. Given the testing report, by adopting a simple re-ranking mitigation strategy on these identified disadvantaged groups, we show that the fairness of DRSs can be significantly improved. We conducted extensive experiments on multiple industry-level DRSs adopted by leading companies. The results confirm that FairRec is effective and efficient in identifying the deeply hidden fairness issues, e.g., achieving 95% testing accuracy with half to 1/8 time.
Cause-and-Effect Analysis of ADAS: A Comparison Study between Literature Review and Complaint Data
Jul 30, 2022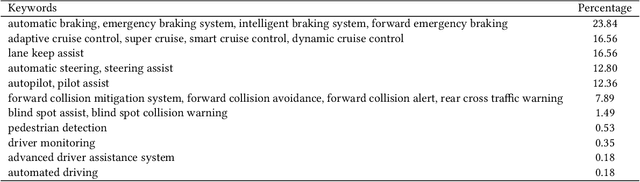

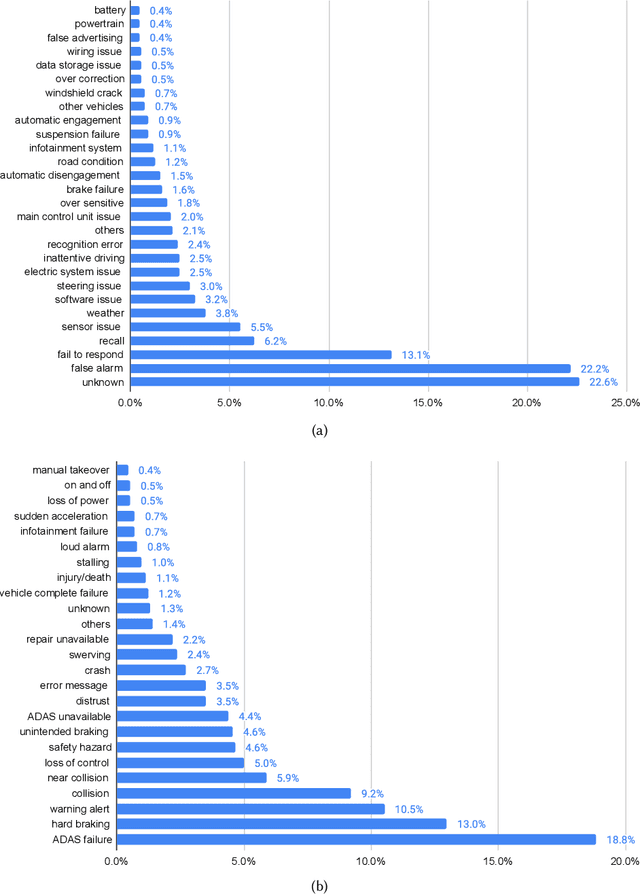

Advanced driver assistance systems (ADAS) are designed to improve vehicle safety. However, it is difficult to achieve such benefits without understanding the causes and limitations of the current ADAS and their possible solutions. This study 1) investigated the limitations and solutions of ADAS through a literature review, 2) identified the causes and effects of ADAS through consumer complaints using natural language processing models, and 3) compared the major differences between the two. These two lines of research identified similar categories of ADAS causes, including human factors, environmental factors, and vehicle factors. However, academic research focused more on human factors of ADAS issues and proposed advanced algorithms to mitigate such issues while drivers complained more of vehicle factors of ADAS failures, which led to associated top consequences. The findings from these two sources tend to complement each other and provide important implications for the improvement of ADAS in the future.