 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpaceTrack-TimeSeries: Time Series Dataset towards Satellite Orbit Analysis
Jun 16, 2025With the rapid advancement of aerospace technology and the large-scale deployment of low Earth orbit (LEO) satellite constellations, the challenges facing astronomical observations and deep space exploration have become increasingly pronounced. As a result, the demand for high-precision orbital data on space objects-along with comprehensive analyses of satellite positioning, constellation configurations, and deep space satellite dynamics-has grown more urgent. However, there remains a notable lack of publicly accessible, real-world datasets to support research in areas such as space object maneuver behavior prediction and collision risk assessment. This study seeks to address this gap by collecting and curating a representative dataset of maneuvering behavior from Starlink satellites. The dataset integrates Two-Line Element (TLE) catalog data with corresponding high-precision ephemeris data, thereby enabling a more realistic and multidimensional modeling of space object behavior. It provides valuable insights into practical deployment of maneuver detection methods and the evaluation of collision risks in increasingly congested orbital environments.
Mask-Enhanced Segment Anything Model for Tumor Lesion Semantic Segmentation
Mar 09, 2024Tumor lesion segmentation on CT or MRI images plays a critical role in cancer diagnosis and treatment planning. Considering the inherent differences in tumor lesion segmentation data across various medical imaging modalities and equipment, integrating medical knowledge into the Segment Anything Model (SAM) presents promising capability due to its versatility and generalization potential. Recent studies have attempted to enhance SAM with medical expertise by pre-training on large-scale medical segmentation datasets. However, challenges still exist in 3D tumor lesion segmentation owing to tumor complexity and the imbalance in foreground and background regions. Therefore, we introduce Mask-Enhanced SAM (M-SAM), an innovative architecture tailored for 3D tumor lesion segmentation. We propose a novel Mask-Enhanced Adapter (MEA) within M-SAM that enriches the semantic information of medical images with positional data from coarse segmentation masks, facilitating the generation of more precise segmentation masks. Furthermore, an iterative refinement scheme is implemented in M-SAM to refine the segmentation masks progressively, leading to improved performance. Extensive experiments on seven tumor lesion segmentation datasets indicate that our M-SAM not only achieves high segmentation accuracy but also exhibits robust generalization.
A Review of Visual Trackers and Analysis of its Application to Mobile Robot
Oct 22, 2019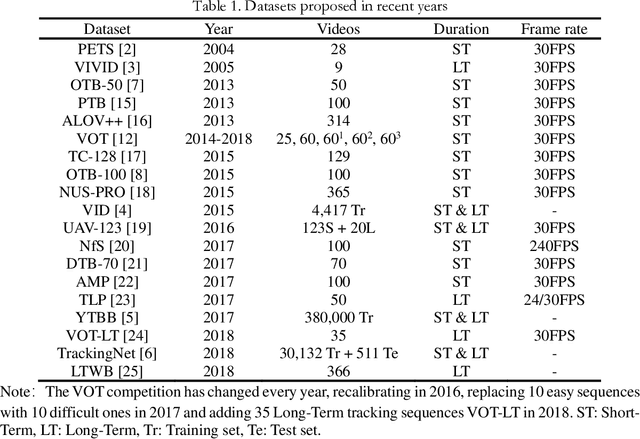

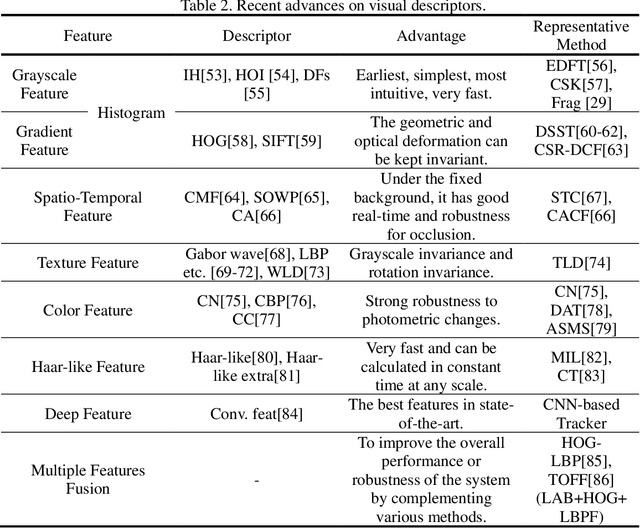

Computer vision has received a significant attention in recent year, which is one of the important parts for robots to obtain information about the external environment. Visual trackers can provide the necessary physical and environmental parameters for the mobile robot, and their performance is related to the actual application of the robot. This study provides a comprehensive survey on visual trackers. Following a brief introduction, we first analyzed the basic framework and difficulties of visual trackers. Then the structure of generative and discriminative methods is introduced, and summarized the feature descriptors, modeling methods, and learning methods which be used in tracker. Later we reviewed and evaluated the state-of-the-art progress on discriminative trackers from three directions: correlation filter, deep learning and convolutional features. Finally, we analyzed the research direction of visual tracker used in mobile robot, as well as outlined the future trends for visual tracker on mobile robot.
Tracking system of Mine Patrol Robot for Low Illumination Environment
Aug 16, 2019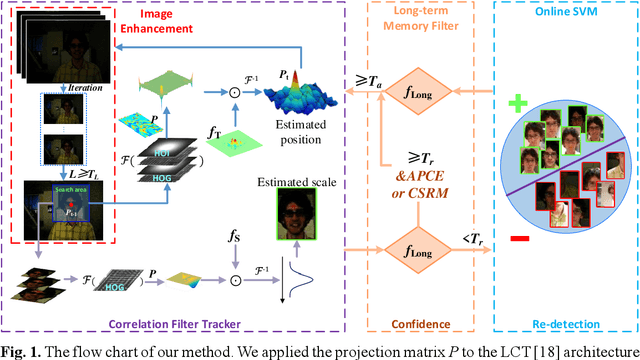



Computer vision has received a significant attention in recent years, which is one of the important parts for robots to apperceive external environment. Discriminative Correlation Filter (DCF) based trackers gained more popularity due to their efficiency, however, tracking in low-illumination environments is a challenging problem, not yet successfully addressed in the literature. In this work, we tackle the problems by introducing Low-Illumination Long-term Correlation Tracker (LLCT). First, fused features only including HOG and Color Names are employed to boost the tracking efficiency. Second, we used the standard PCA to reduction scheme in the translation and scale estimation phase for accelerating. Third, we learned a long-term correlation filter to keep the long-term memory ability. Finally, update memory templates with interval updates, then re-match existing and initial templates every few frames to maintain template accuracy. The extensive experiments on popular Object Tracking Benchmark OTB-50 datasets have demonstrated that the proposed tracker outperforms the state-of-the-art trackers significantly achieves a high real-time (33FPS) performance. In addition, the proposed approach can be integrated easily in robot system and the running speed performed well. The experimental results show that the novel tracker performance in low-illumination environment is better than that of general trackers.
Voting for Deceptive Opinion Spam Detection
Sep 16, 2014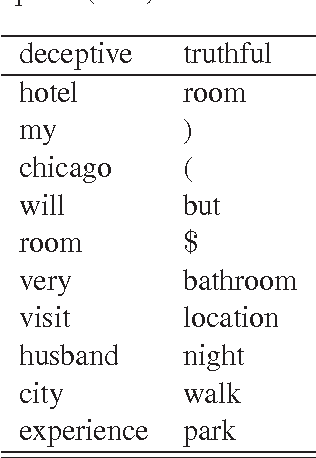

Consumers' purchase decisions are increasingly influenced by user-generated online reviews. Accordingly, there has been growing concern about the potential for posting deceptive opinion spam fictitious reviews that have been deliberately written to sound authentic, to deceive the readers. Existing approaches mainly focus on developing automatic supervised learning based methods to help users identify deceptive opinion spams. This work, we used the LSI and Sprinkled LSI technique to reduce the dimension for deception detection. We make our contribution to demonstrate what LSI is capturing in latent semantic space and reveal how deceptive opinions can be recognized automatically from truthful opinions. Finally, we proposed a voting scheme which integrates different approaches to further improve the classification performance.