 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Review of Visual Trackers and Analysis of its Application to Mobile Robot
Oct 22, 2019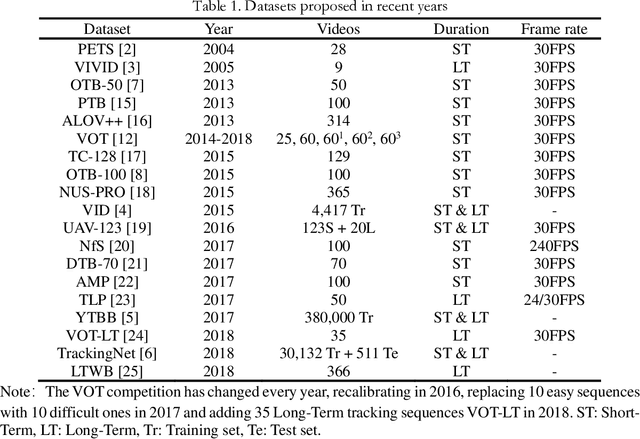

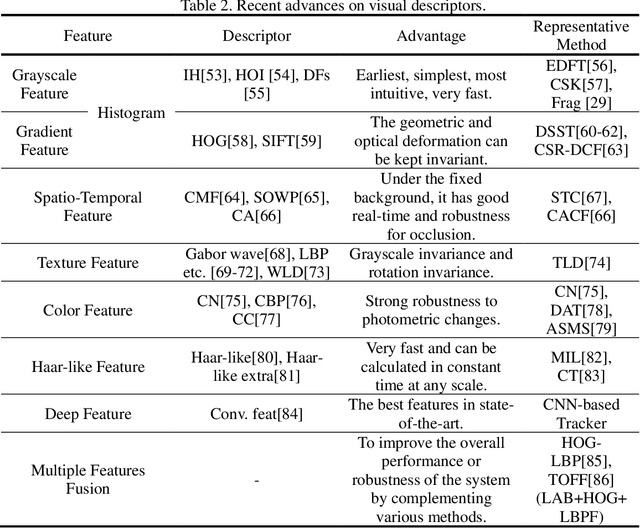

Computer vision has received a significant attention in recent year, which is one of the important parts for robots to obtain information about the external environment. Visual trackers can provide the necessary physical and environmental parameters for the mobile robot, and their performance is related to the actual application of the robot. This study provides a comprehensive survey on visual trackers. Following a brief introduction, we first analyzed the basic framework and difficulties of visual trackers. Then the structure of generative and discriminative methods is introduced, and summarized the feature descriptors, modeling methods, and learning methods which be used in tracker. Later we reviewed and evaluated the state-of-the-art progress on discriminative trackers from three directions: correlation filter, deep learning and convolutional features. Finally, we analyzed the research direction of visual tracker used in mobile robot, as well as outlined the future trends for visual tracker on mobile robot.
Tracking system of Mine Patrol Robot for Low Illumination Environment
Aug 16, 2019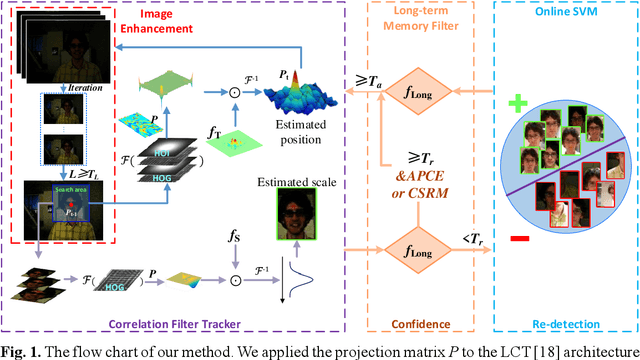



Computer vision has received a significant attention in recent years, which is one of the important parts for robots to apperceive external environment. Discriminative Correlation Filter (DCF) based trackers gained more popularity due to their efficiency, however, tracking in low-illumination environments is a challenging problem, not yet successfully addressed in the literature. In this work, we tackle the problems by introducing Low-Illumination Long-term Correlation Tracker (LLCT). First, fused features only including HOG and Color Names are employed to boost the tracking efficiency. Second, we used the standard PCA to reduction scheme in the translation and scale estimation phase for accelerating. Third, we learned a long-term correlation filter to keep the long-term memory ability. Finally, update memory templates with interval updates, then re-match existing and initial templates every few frames to maintain template accuracy. The extensive experiments on popular Object Tracking Benchmark OTB-50 datasets have demonstrated that the proposed tracker outperforms the state-of-the-art trackers significantly achieves a high real-time (33FPS) performance. In addition, the proposed approach can be integrated easily in robot system and the running speed performed well. The experimental results show that the novel tracker performance in low-illumination environment is better than that of general trackers.