 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Review of Visual Trackers and Analysis of its Application to Mobile Robot
Paper and Code
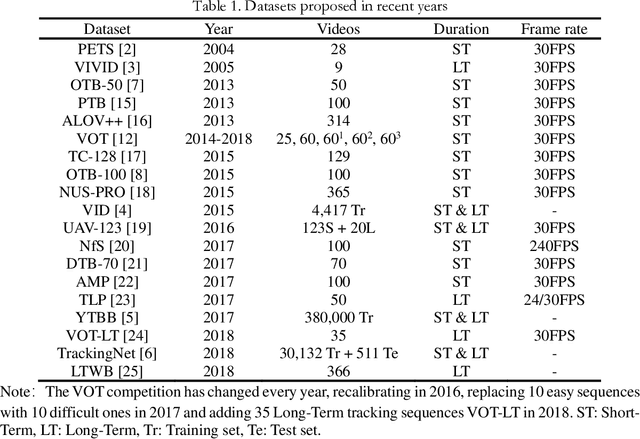

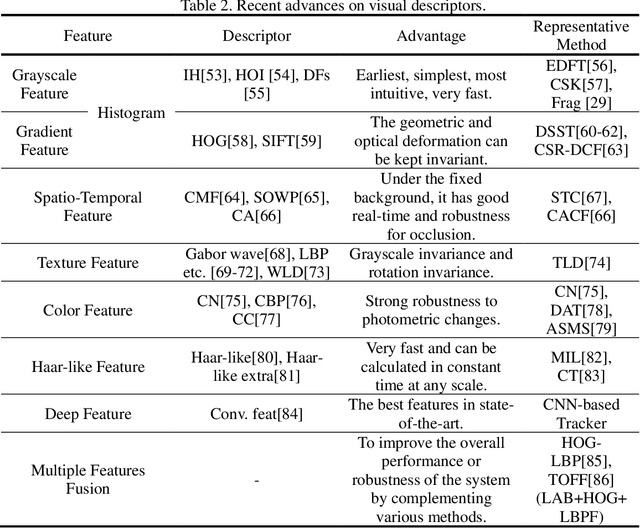

Computer vision has received a significant attention in recent year, which is one of the important parts for robots to obtain information about the external environment. Visual trackers can provide the necessary physical and environmental parameters for the mobile robot, and their performance is related to the actual application of the robot. This study provides a comprehensive survey on visual trackers. Following a brief introduction, we first analyzed the basic framework and difficulties of visual trackers. Then the structure of generative and discriminative methods is introduced, and summarized the feature descriptors, modeling methods, and learning methods which be used in tracker. Later we reviewed and evaluated the state-of-the-art progress on discriminative trackers from three directions: correlation filter, deep learning and convolutional features. Finally, we analyzed the research direction of visual tracker used in mobile robot, as well as outlined the future trends for visual tracker on mobile robot.