 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Stability of Singular Distribution: A Spectral Perspective on the Two-Phase Dynamics of Language Model Pre-training
May 26, 2026Large language model pre-training typically exhibits a two-phase trajectory: a fast initial loss drop followed by a prolonged slow improvement. We identify an underlying spectral phenomenon, Stability of Singular Distribution (SoSD), where the trace-normalized singular value spectrum stabilizes early, even as parameter matrices continue to evolve. We demonstrate that synchronization between SoSD and the slow-descent regime is widely observed across diverse architectures (GPT-2, LLaMA) and settings, including various schedules (Step-wise, WSD, Cosine Decay), weight decays, and optimizers (AdamW, Muon). By analyzing a simplified Transformer, we prove that growing weight norms inevitably precipitate an early SoSD threshold, after which the rate of loss decrease becomes theoretically bounded by the variation in the singular distribution. We further interpret strategies like WSD and Muon through their ability to modulate the SoSD scale, offering a spectral lens for understanding efficient pre-training dynamics.
Extra-Merge: Tracing the Rank-1 Subspace of Model Merging in Language Model Pre-Training
May 26, 2026Model merging has emerged as a lightweight paradigm for enhancing Large Language Models (LLMs), yet its underlying mechanisms remain poorly understood. In this work, we analyze late-stage pre-training trajectories and uncover a \textbf{Rank-1 Subspace} phenomenon: while raw optimization steps oscillate violently, consecutive \emph{merged} checkpoints collapse onto a stable, approximately one-dimensional linear manifold. We theoretically ground this observation in a \emph{river-valley} landscape analysis: averaging acts as a geometric low-pass filter that dampens high-curvature noise to reveal the optimal descent direction. Capitalizing on this insight, we propose \textbf{Extra-Merge}, a training-free strategy that extrapolates along this subspace to minimize loss without additional gradient updates. Extensive experiments across GPT-2 and LLaMA families (124M to 2B) demonstrate that Extra-Merge consistently outperforms standard merging baselines. Notably, it yields consistent zero-shot accuracy gains on Pythia-12B downstream tasks and generalizes effectively to the Muon optimizer \citep{jordan2024muon}.
State Rank Dynamics in Linear Attention LLMs
Feb 02, 2026Linear Attention Large Language Models (LLMs) offer a compelling recurrent formulation that compresses context into a fixed-size state matrix, enabling constant-time inference. However, the internal dynamics of this compressed state remain largely opaque. In this work, we present a comprehensive study on the runtime state dynamics of state-of-the-art Linear Attention models. We uncover a fundamental phenomenon termed State Rank Stratification, characterized by a distinct spectral bifurcation among linear attention heads: while one group maintains an effective rank oscillating near zero, the other exhibits rapid growth that converges to an upper bound. Extensive experiments across diverse inference contexts reveal that these dynamics remain strikingly consistent, indicating that the identity of a head,whether low-rank or high-rank,is an intrinsic structural property acquired during pre-training, rather than a transient state dependent on the input data. Furthermore, our diagnostic probes reveal a surprising functional divergence: low-rank heads are indispensable for model reasoning, whereas high-rank heads exhibit significant redundancy. Leveraging this insight, we propose Joint Rank-Norm Pruning, a zero-shot strategy that achieves a 38.9\% reduction in KV-cache overhead while largely maintaining model accuracy.
GarmentGS: Point-Cloud Guided Gaussian Splatting for High-Fidelity Non-Watertight 3D Garment Reconstruction
May 04, 2025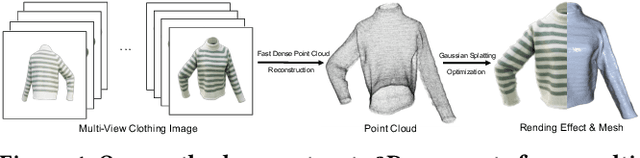
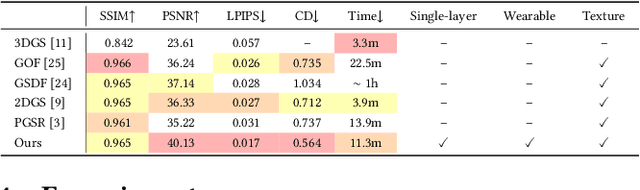
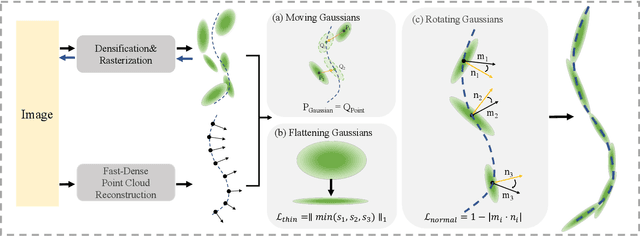
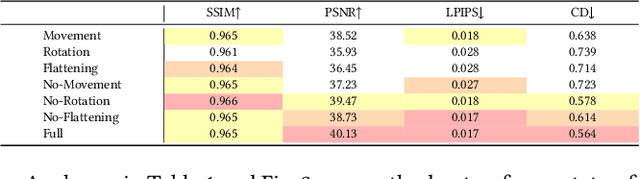
Traditional 3D garment creation requires extensive manual operations, resulting in time and labor costs. Recently, 3D Gaussian Splatting has achieved breakthrough progress in 3D scene reconstruction and rendering, attracting widespread attention and opening new pathways for 3D garment reconstruction. However, due to the unstructured and irregular nature of Gaussian primitives, it is difficult to reconstruct high-fidelity, non-watertight 3D garments. In this paper, we present GarmentGS, a dense point cloud-guided method that can reconstruct high-fidelity garment surfaces with high geometric accuracy and generate non-watertight, single-layer meshes. Our method introduces a fast dense point cloud reconstruction module that can complete garment point cloud reconstruction in 10 minutes, compared to traditional methods that require several hours. Furthermore, we use dense point clouds to guide the movement, flattening, and rotation of Gaussian primitives, enabling better distribution on the garment surface to achieve superior rendering effects and geometric accuracy. Through numerical and visual comparisons, our method achieves fast training and real-time rendering while maintaining competitive quality.
Cooperative Hybrid Multi-Agent Pathfinding Based on Shared Exploration Maps
Mar 28, 2025Multi-Agent Pathfinding is used in areas including multi-robot formations, warehouse logistics, and intelligent vehicles. However, many environments are incomplete or frequently change, making it difficult for standard centralized planning or pure reinforcement learning to maintain both global solution quality and local flexibility. This paper introduces a hybrid framework that integrates D* Lite global search with multi-agent reinforcement learning, using a switching mechanism and a freeze-prevention strategy to handle dynamic conditions and crowded settings. We evaluate the framework in the discrete POGEMA environment and compare it with baseline methods. Experimental outcomes indicate that the proposed framework substantially improves success rate, collision rate, and path efficiency. The model is further tested on the EyeSim platform, where it maintains feasible Pathfinding under frequent changes and large-scale robot deployments.
Dynamic Decoupling of Placid Terminal Attractor-based Gradient Descent Algorithm
Sep 10, 2024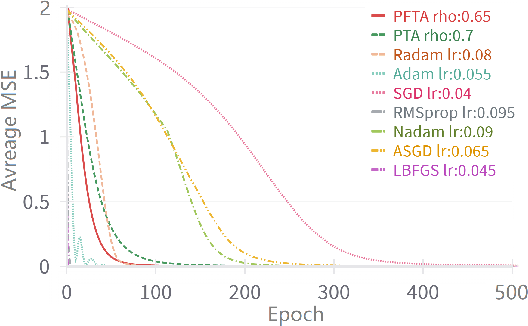
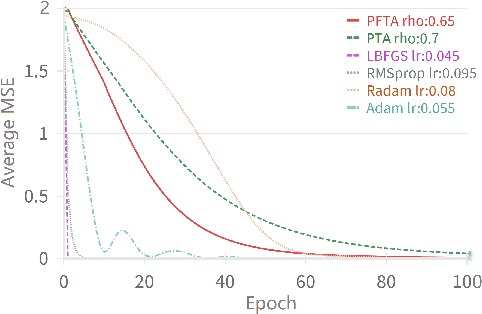
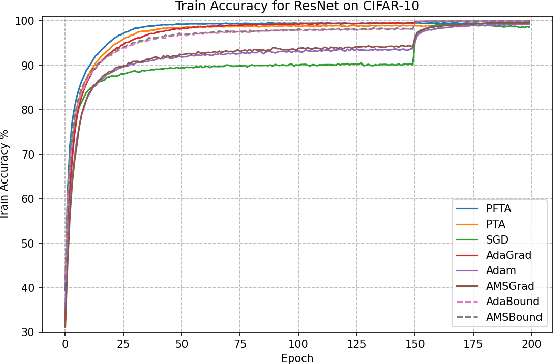
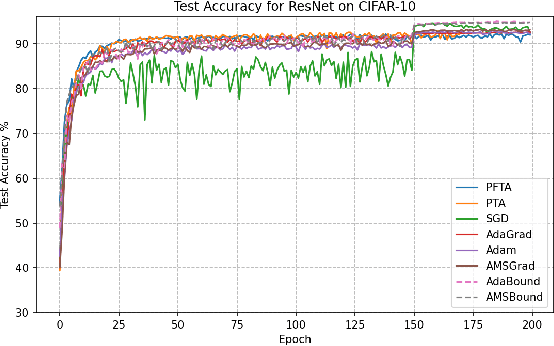
Gradient descent (GD) and stochastic gradient descent (SGD) have been widely used in a large number of application domains. Therefore, understanding the dynamics of GD and improving its convergence speed is still of great importance. This paper carefully analyzes the dynamics of GD based on the terminal attractor at different stages of its gradient flow. On the basis of the terminal sliding mode theory and the terminal attractor theory, four adaptive learning rates are designed. Their performances are investigated in light of a detailed theoretical investigation, and the running times of the learning procedures are evaluated and compared. The total times of their learning processes are also studied in detail. To evaluate their effectiveness, various simulation results are investigated on a function approximation problem and an image classification problem.
IVLMap: Instance-Aware Visual Language Grounding for Consumer Robot Navigation
Mar 28, 2024Vision-and-Language Navigation (VLN) is a challenging task that requires a robot to navigate in photo-realistic environments with human natural language promptings. Recent studies aim to handle this task by constructing the semantic spatial map representation of the environment, and then leveraging the strong ability of reasoning in large language models for generalizing code for guiding the robot navigation. However, these methods face limitations in instance-level and attribute-level navigation tasks as they cannot distinguish different instances of the same object. To address this challenge, we propose a new method, namely, Instance-aware Visual Language Map (IVLMap), to empower the robot with instance-level and attribute-level semantic mapping, where it is autonomously constructed by fusing the RGBD video data collected from the robot agent with special-designed natural language map indexing in the bird's-in-eye view. Such indexing is instance-level and attribute-level. In particular, when integrated with a large language model, IVLMap demonstrates the capability to i) transform natural language into navigation targets with instance and attribute information, enabling precise localization, and ii) accomplish zero-shot end-to-end navigation tasks based on natural language commands. Extensive navigation experiments are conducted. Simulation results illustrate that our method can achieve an average improvement of 14.4\% in navigation accuracy. Code and demo are released at https://ivlmap.github.io/.
Discrete-Time Modeling and Handover Analysis of Intelligent Reflecting Surface-Assisted Networks
Mar 12, 2024



Owning to the reflection gain and double path loss featured by intelligent reflecting surface (IRS) channels, handover (HO) locations become irregular and the signal strength fluctuates sharply with variations in IRS connections during HO, the risk of HO failures (HOFs) is exacerbated and thus HO parameters require reconfiguration. However, existing HO models only assume monotonic negative exponential path loss and cannot obtain sound HO parameters. This paper proposes a discrete-time model to explicitly track the HO process with variations in IRS connections, where IRS connections and HO process are discretized as finite states by measurement intervals, and transitions between states are modeled as stochastic processes. Specifically, to capture signal fluctuations during HO, IRS connection state-dependent distributions of the user-IRS distance are modified by the correlation between measurement intervals. In addition, states of the HO process are formed with Time-to-Trigger and HO margin whose transition probabilities are integrated concerning all IRS connection states. Trigger location distributions and probabilities of HO, HOF, and ping-pong (PP) are obtained by tracing user HO states. Results show IRSs mitigate PPs by 48% but exacerbate HOFs by 90% under regular parameters. Optimal parameters are mined ensuring probabilities of HOF and PP are both less than 0.1%.
Analysis of Intelligent Reflecting Surface-Enhanced Mobility Through a Line-of-Sight State Transition Model
Mar 12, 2024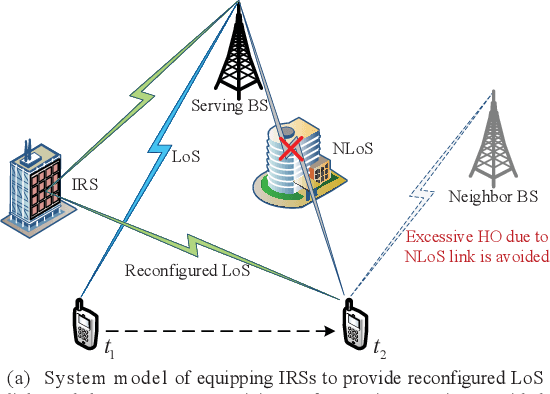
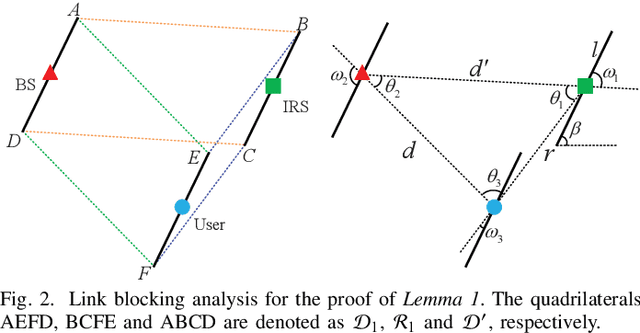
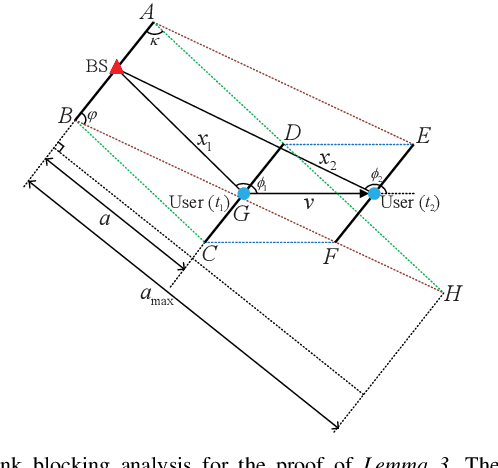
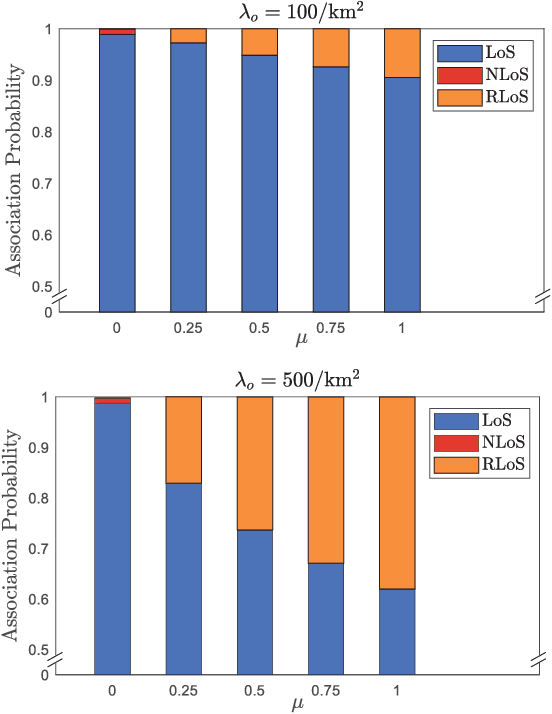
Rapid signal fluctuations due to blockage effects cause excessive handovers (HOs) and degrade mobility performance. By reconfiguring line-of-sight (LoS) Links through passive reflections, intelligent reflective surface (IRS) has the potential to address this issue. Due to the lack of introducing blocking effects, existing HO analyses cannot capture excessive HOs or exploit enhancements via IRSs. This paper proposes an LoS state transition model enabling analysis of mobility enhancement achieved by IRS-reconfigured LoS links, where LoS link blocking and reconfiguration utilizing IRS during user movement are explicitly modeled as stochastic processes. Specifically, the condition for blocking LoS links is characterized as a set of possible blockage locations, the distribution of available IRSs is thinned by the criteria for reconfiguring LoS links. In addition, BSs potentially handed over are categorized by probabilities of LoS states to enable HO decision analysis. By projecting distinct gains of LoS states onto a uniform equivalent distance criterion, mobility enhanced by IRS is quantified through the compact expression of HO probability. Results show the probability of dropping into non-LoS decreases by 70% when deploying IRSs with the density of 93/km$^2$, and HOs decrease by 67% under the optimal IRS distributed deployment parameter.
PLCNet: Patch-wise Lane Correction Network for Automatic Lane Correction in High-definition Maps
Jan 25, 2024In High-definition (HD) maps, lane elements constitute the majority of components and demand stringent localization requirements to ensure safe vehicle navigation. Vision lane detection with LiDAR position assignment is a prevalent method to acquire initial lanes for HD maps. However, due to incorrect vision detection and coarse camera-LiDAR calibration, initial lanes may deviate from their true positions within an uncertain range. To mitigate the need for manual lane correction, we propose a patch-wise lane correction network (PLCNet) to automatically correct the positions of initial lane points in local LiDAR images that are transformed from point clouds. PLCNet first extracts multi-scale image features and crops patch (ROI) features centered at each initial lane point. By applying ROIAlign, the fix-sized ROI features are flattened into 1D features. Then, a 1D lane attention module is devised to compute instance-level lane features with adaptive weights. Finally, lane correction offsets are inferred by a multi-layer perceptron and used to correct the initial lane positions. Considering practical applications, our automatic method supports merging local corrected lanes into global corrected lanes. Through extensive experiments on a self-built dataset, we demonstrate that PLCNet achieves fast and effective initial lane correction.