 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCooperative Hybrid Multi-Agent Pathfinding Based on Shared Exploration Maps
Mar 28, 2025Multi-Agent Pathfinding is used in areas including multi-robot formations, warehouse logistics, and intelligent vehicles. However, many environments are incomplete or frequently change, making it difficult for standard centralized planning or pure reinforcement learning to maintain both global solution quality and local flexibility. This paper introduces a hybrid framework that integrates D* Lite global search with multi-agent reinforcement learning, using a switching mechanism and a freeze-prevention strategy to handle dynamic conditions and crowded settings. We evaluate the framework in the discrete POGEMA environment and compare it with baseline methods. Experimental outcomes indicate that the proposed framework substantially improves success rate, collision rate, and path efficiency. The model is further tested on the EyeSim platform, where it maintains feasible Pathfinding under frequent changes and large-scale robot deployments.
A Review of Visual Odometry Methods and Its Applications for Autonomous Driving
Sep 19, 2020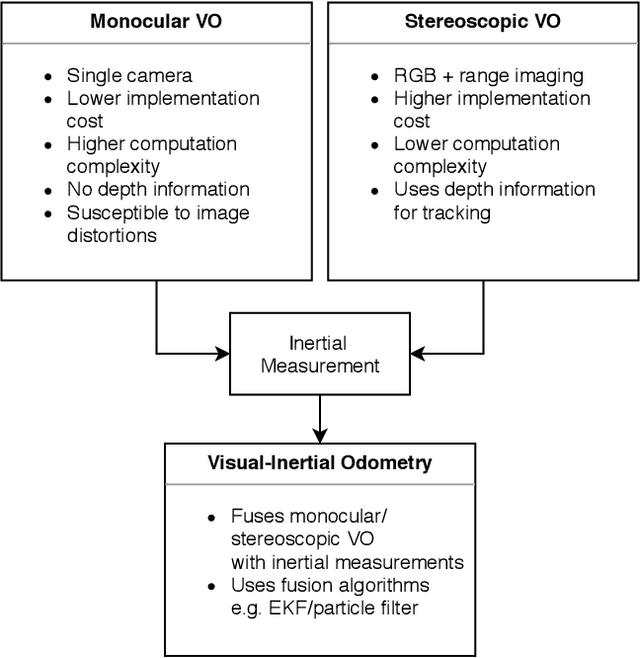
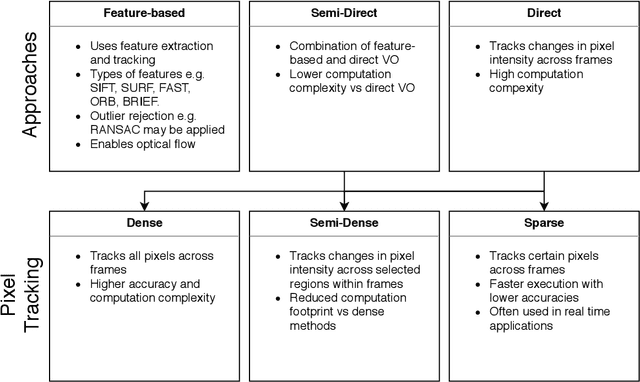
The research into autonomous driving applications has observed an increase in computer vision-based approaches in recent years. In attempts to develop exclusive vision-based systems, visual odometry is often considered as a key element to achieve motion estimation and self-localisation, in place of wheel odometry or inertial measurements. This paper presents a recent review to methods that are pertinent to visual odometry with an emphasis on autonomous driving. This review covers visual odometry in their monocular, stereoscopic and visual-inertial form, individually presenting them with analyses related to their applications. Discussions are drawn to outline the problems faced in the current state of research, and to summarise the works reviewed. This paper concludes with future work suggestions to aid prospective developments in visual odometry.
A Methodological Review of Visual Road Recognition Procedures for Autonomous Driving Applications
May 05, 2019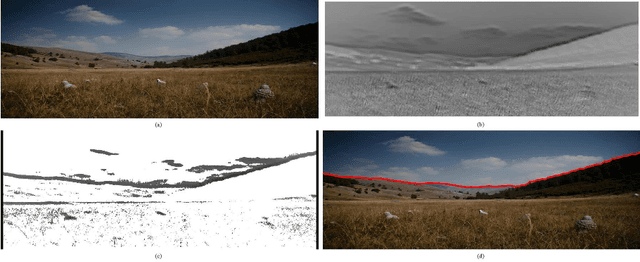
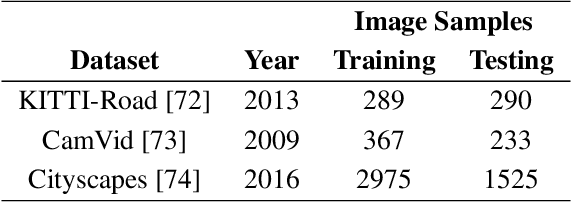
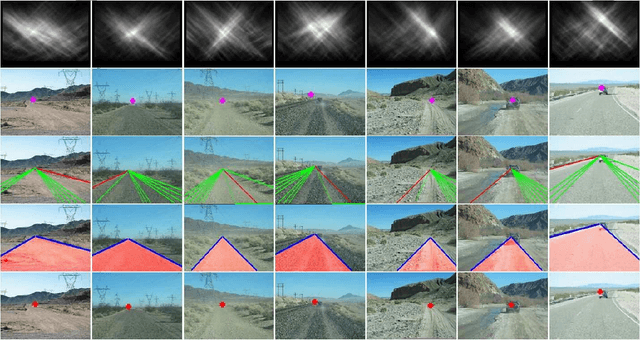
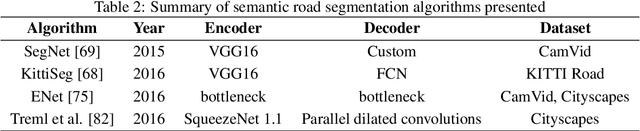
The current research interest in autonomous driving is growing at a rapid pace, attracting great investments from both the academic and corporate sectors. In order for vehicles to be fully autonomous, it is imperative that the driver assistance system is adapt in road and lane keeping. In this paper, we present a methodological review of techniques with a focus on visual road detection and recognition. We adopt a pragmatic outlook in presenting this review, whereby the procedures of road recognition is emphasised with respect to its practical implementations. The contribution of this review hence covers the topic in two parts -- the first part describes the methodological approach to conventional road detection, which covers the algorithms and approaches involved to classify and segregate roads from non-road regions; and the other part focuses on recent state-of-the-art machine learning techniques that are applied to visual road recognition, with an emphasis on methods that incorporate convolutional neural networks and semantic segmentation. A subsequent overview of recent implementations in the commercial sector is also presented, along with some recent research works pertaining to road detections.