 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Assessment Misconduct Detection using Internet Protocol and Behavioural Classification
Jan 24, 2022With the recent prevalence of remote education, academic assessments are often conducted online, leading to further concerns surrounding assessment misconducts. This paper investigates the potentials of online assessment misconduct (e-cheating) and proposes practical countermeasures against them. The mechanism for detecting the practices of online cheating is presented in the form of an e-cheating intelligent agent, comprising of an internet protocol (IP) detector and a behavioural monitor. The IP detector is an auxiliary detector which assigns randomised and unique assessment sets as an early procedure to reduce potential misconducts. The behavioural monitor scans for irregularities in assessment responses from the candidates, further reducing any misconduct attempts. This is highlighted through the proposal of the DenseLSTM using a deep learning approach. Additionally, a new PT Behavioural Database is presented and made publicly available. Experiments conducted on this dataset confirm the effectiveness of the DenseLSTM, resulting in classification accuracies of up to 90.7%.
A Review of Visual Odometry Methods and Its Applications for Autonomous Driving
Sep 19, 2020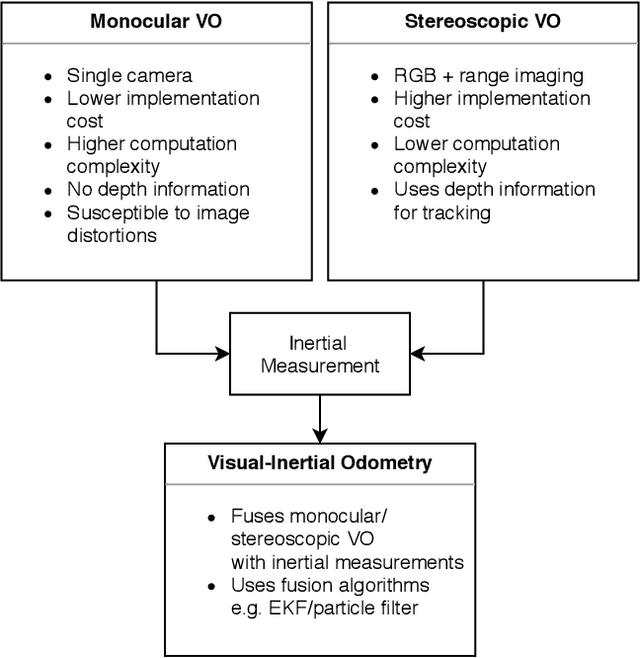
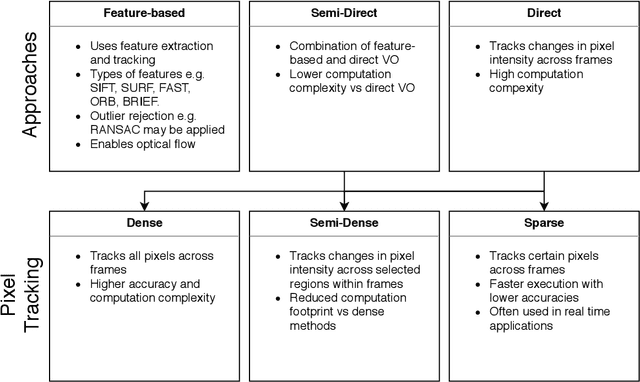
The research into autonomous driving applications has observed an increase in computer vision-based approaches in recent years. In attempts to develop exclusive vision-based systems, visual odometry is often considered as a key element to achieve motion estimation and self-localisation, in place of wheel odometry or inertial measurements. This paper presents a recent review to methods that are pertinent to visual odometry with an emphasis on autonomous driving. This review covers visual odometry in their monocular, stereoscopic and visual-inertial form, individually presenting them with analyses related to their applications. Discussions are drawn to outline the problems faced in the current state of research, and to summarise the works reviewed. This paper concludes with future work suggestions to aid prospective developments in visual odometry.
A Methodological Review of Visual Road Recognition Procedures for Autonomous Driving Applications
May 05, 2019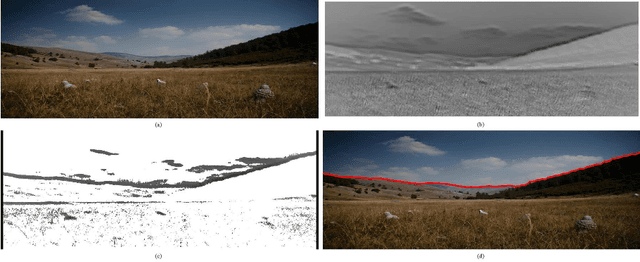
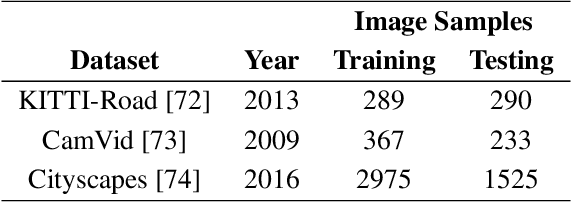
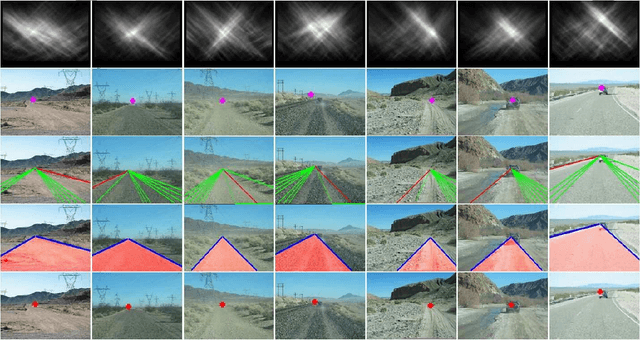
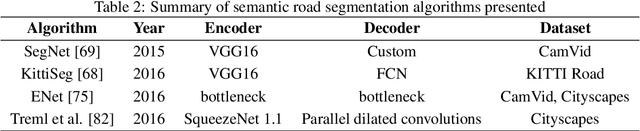
The current research interest in autonomous driving is growing at a rapid pace, attracting great investments from both the academic and corporate sectors. In order for vehicles to be fully autonomous, it is imperative that the driver assistance system is adapt in road and lane keeping. In this paper, we present a methodological review of techniques with a focus on visual road detection and recognition. We adopt a pragmatic outlook in presenting this review, whereby the procedures of road recognition is emphasised with respect to its practical implementations. The contribution of this review hence covers the topic in two parts -- the first part describes the methodological approach to conventional road detection, which covers the algorithms and approaches involved to classify and segregate roads from non-road regions; and the other part focuses on recent state-of-the-art machine learning techniques that are applied to visual road recognition, with an emphasis on methods that incorporate convolutional neural networks and semantic segmentation. A subsequent overview of recent implementations in the commercial sector is also presented, along with some recent research works pertaining to road detections.