 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePixel-Perfect Depth with Semantics-Prompted Diffusion Transformers
Oct 08, 2025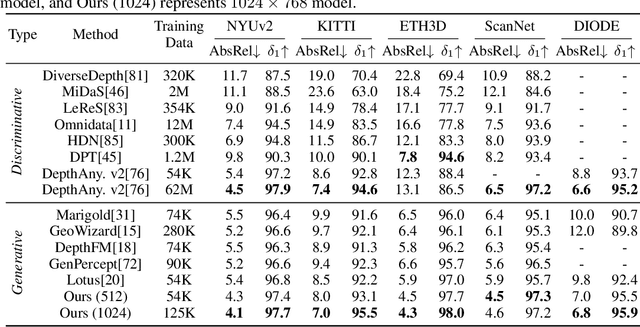
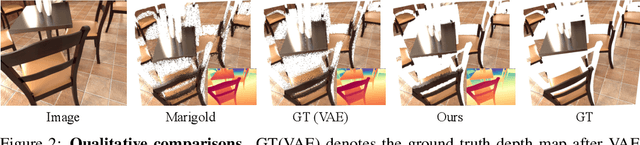
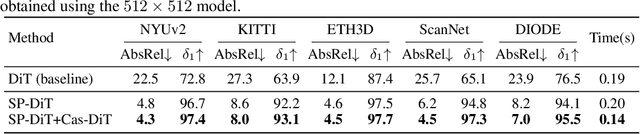
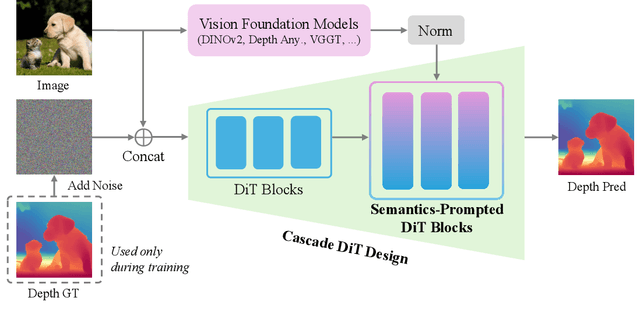
This paper presents Pixel-Perfect Depth, a monocular depth estimation model based on pixel-space diffusion generation that produces high-quality, flying-pixel-free point clouds from estimated depth maps. Current generative depth estimation models fine-tune Stable Diffusion and achieve impressive performance. However, they require a VAE to compress depth maps into latent space, which inevitably introduces \textit{flying pixels} at edges and details. Our model addresses this challenge by directly performing diffusion generation in the pixel space, avoiding VAE-induced artifacts. To overcome the high complexity associated with pixel-space generation, we introduce two novel designs: 1) Semantics-Prompted Diffusion Transformers (SP-DiT), which incorporate semantic representations from vision foundation models into DiT to prompt the diffusion process, thereby preserving global semantic consistency while enhancing fine-grained visual details; and 2) Cascade DiT Design that progressively increases the number of tokens to further enhance efficiency and accuracy. Our model achieves the best performance among all published generative models across five benchmarks, and significantly outperforms all other models in edge-aware point cloud evaluation.
SR-LIO++: Efficient LiDAR-Inertial Odometry and Quantized Mapping with Sweep Reconstruction
Mar 29, 2025Addressing the inherent low acquisition frequency limitation of 3D LiDAR to achieve high-frequency output has become a critical research focus in the LiDAR-Inertial Odometry (LIO) domain. To ensure real-time performance, frequency-enhanced LIO systems must process each sweep within significantly reduced timeframe, which presents substantial challenges for deployment on low-computational-power platforms. To address these limitations, we introduce SR-LIO++, an innovative LIO system capable of achieving doubled output frequency relative to input frequency on resource-constrained hardware platforms, including the Raspberry Pi 4B. Our system employs a sweep reconstruction methodology to enhance LiDAR sweep frequency, generating high-frequency reconstructed sweeps. Building upon this foundation, we propose a caching mechanism for intermediate results (i.e., surface parameters) of the most recent segments, effectively minimizing redundant processing of common segments in adjacent reconstructed sweeps. This method decouples processing time from the traditionally linear dependence on reconstructed sweep frequency. Furthermore, we present a quantized map point management based on index table mapping, significantly reducing memory usage by converting global 3D point storage from 64-bit double precision to 8-bit char representation. This method also converts the computationally intensive Euclidean distance calculations in nearest neighbor searches from 64-bit double precision to 16-bit short and 32-bit integer formats, significantly reducing both memory and computational cost. Extensive experimental evaluations across three distinct computing platforms and four public datasets demonstrate that SR-LIO++ maintains state-of-the-art accuracy while substantially enhancing efficiency. Notably, our system successfully achieves 20Hz state output on Raspberry Pi 4B hardware.
Uni-Gaussians: Unifying Camera and Lidar Simulation with Gaussians for Dynamic Driving Scenarios
Mar 11, 2025Ensuring the safety of autonomous vehicles necessitates comprehensive simulation of multi-sensor data, encompassing inputs from both cameras and LiDAR sensors, across various dynamic driving scenarios. Neural rendering techniques, which utilize collected raw sensor data to simulate these dynamic environments, have emerged as a leading methodology. While NeRF-based approaches can uniformly represent scenes for rendering data from both camera and LiDAR, they are hindered by slow rendering speeds due to dense sampling. Conversely, Gaussian Splatting-based methods employ Gaussian primitives for scene representation and achieve rapid rendering through rasterization. However, these rasterization-based techniques struggle to accurately model non-linear optical sensors. This limitation restricts their applicability to sensors beyond pinhole cameras. To address these challenges and enable unified representation of dynamic driving scenarios using Gaussian primitives, this study proposes a novel hybrid approach. Our method utilizes rasterization for rendering image data while employing Gaussian ray-tracing for LiDAR data rendering. Experimental results on public datasets demonstrate that our approach outperforms current state-of-the-art methods. This work presents a unified and efficient solution for realistic simulation of camera and LiDAR data in autonomous driving scenarios using Gaussian primitives, offering significant advancements in both rendering quality and computational efficiency.
BAT: Learning Event-based Optical Flow with Bidirectional Adaptive Temporal Correlation
Mar 05, 2025Event cameras deliver visual information characterized by a high dynamic range and high temporal resolution, offering significant advantages in estimating optical flow for complex lighting conditions and fast-moving objects. Current advanced optical flow methods for event cameras largely adopt established image-based frameworks. However, the spatial sparsity of event data limits their performance. In this paper, we present BAT, an innovative framework that estimates event-based optical flow using bidirectional adaptive temporal correlation. BAT includes three novel designs: 1) a bidirectional temporal correlation that transforms bidirectional temporally dense motion cues into spatially dense ones, enabling accurate and spatially dense optical flow estimation; 2) an adaptive temporal sampling strategy for maintaining temporal consistency in correlation; 3) spatially adaptive temporal motion aggregation to efficiently and adaptively aggregate consistent target motion features into adjacent motion features while suppressing inconsistent ones. Our results rank $1^{st}$ on the DSEC-Flow benchmark, outperforming existing state-of-the-art methods by a large margin while also exhibiting sharp edges and high-quality details. Notably, our BAT can accurately predict future optical flow using only past events, significantly outperforming E-RAFT's warm-start approach. Code: \textcolor{magenta}{https://github.com/gangweiX/BAT}.