 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeK-nearest Multi-agent Deep Reinforcement Learning for Collaborative Tasks with a Variable Number of Agents
Jan 18, 2022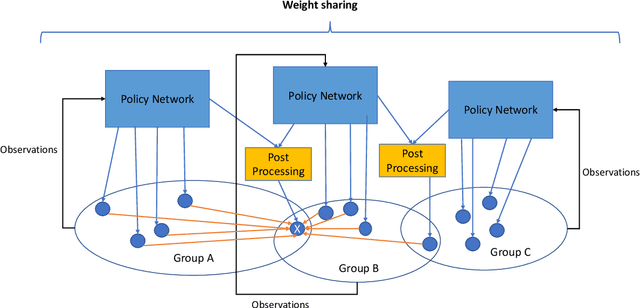
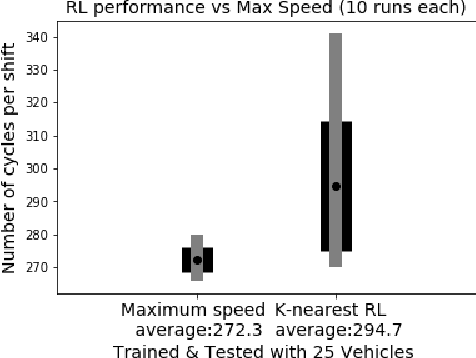
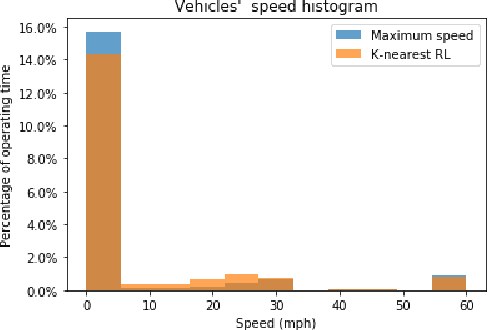
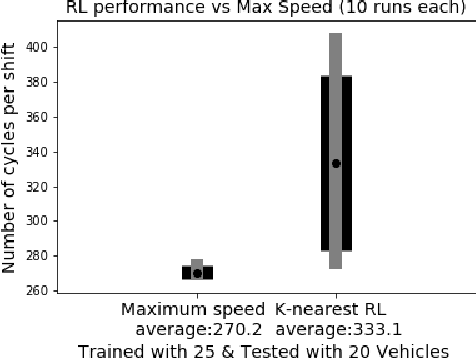
Traditionally, the performance of multi-agent deep reinforcement learning algorithms are demonstrated and validated in gaming environments where we often have a fixed number of agents. In many industrial applications, the number of available agents can change at any given day and even when the number of agents is known ahead of time, it is common for an agent to break during the operation and become unavailable for a period of time. In this paper, we propose a new deep reinforcement learning algorithm for multi-agent collaborative tasks with a variable number of agents. We demonstrate the application of our algorithm using a fleet management simulator developed by Hitachi to generate realistic scenarios in a production site.
An Offline Deep Reinforcement Learning for Maintenance Decision-Making
Sep 28, 2021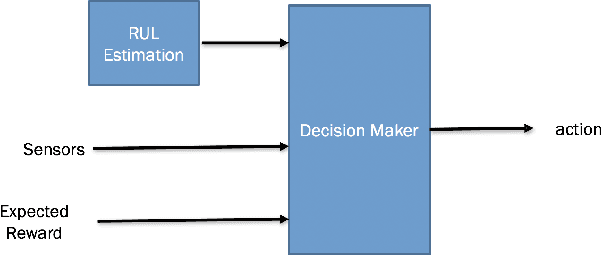
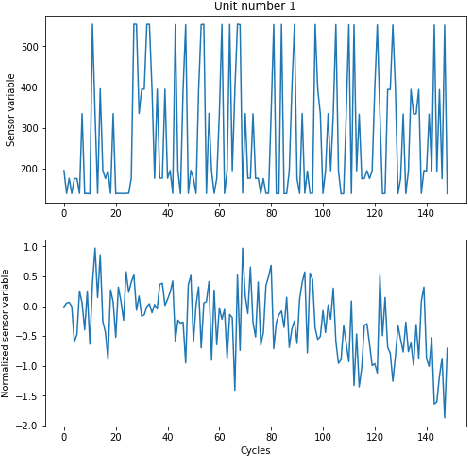
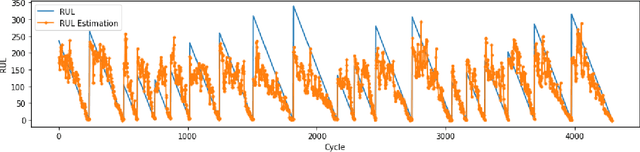
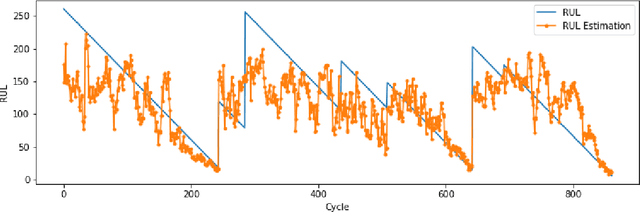
Several machine learning and deep learning frameworks have been proposed to solve remaining useful life estimation and failure prediction problems in recent years. Having access to the remaining useful life estimation or likelihood of failure in near future helps operators to assess the operating conditions and, therefore, provides better opportunities for sound repair and maintenance decisions. However, many operators believe remaining useful life estimation and failure prediction solutions are incomplete answers to the maintenance challenge. They argue that knowing the likelihood of failure in the future is not enough to make maintenance decisions that minimize costs and keep the operators safe. In this paper, we present a maintenance framework based on offline supervised deep reinforcement learning that instead of providing information such as likelihood of failure, suggests actions such as "continuation of the operation" or "the visitation of the repair shop" to the operators in order to maximize the overall profit. Using offline reinforcement learning makes it possible to learn the optimum maintenance policy from historical data without relying on expensive simulators. We demonstrate the application of our solution in a case study using the NASA C-MAPSS dataset.
Deep Reinforcement Learning with Adjustments
Sep 28, 2021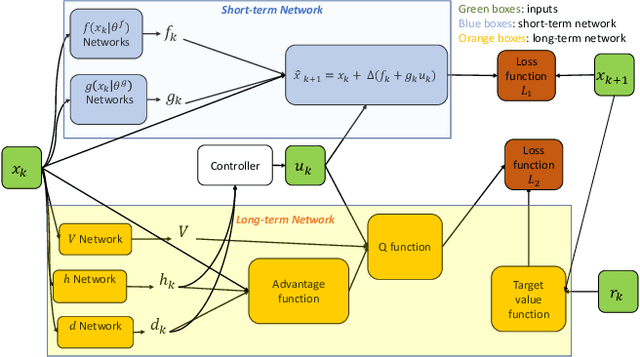
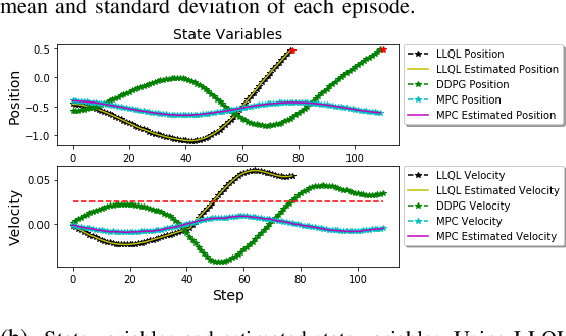
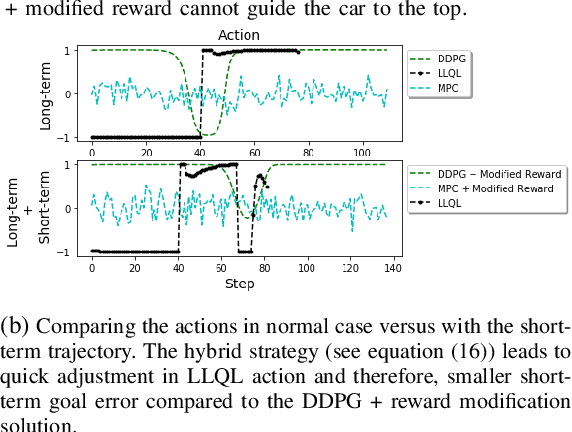
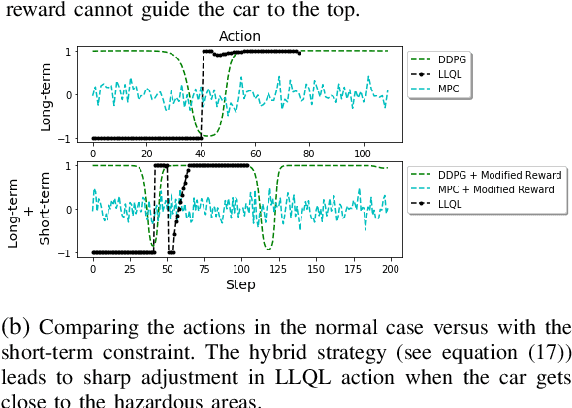
Deep reinforcement learning (RL) algorithms can learn complex policies to optimize agent operation over time. RL algorithms have shown promising results in solving complicated problems in recent years. However, their application on real-world physical systems remains limited. Despite the advancements in RL algorithms, the industries often prefer traditional control strategies. Traditional methods are simple, computationally efficient and easy to adjust. In this paper, we first propose a new Q-learning algorithm for continuous action space, which can bridge the control and RL algorithms and bring us the best of both worlds. Our method can learn complex policies to achieve long-term goals and at the same time it can be easily adjusted to address short-term requirements without retraining. Next, we present an approximation of our algorithm which can be applied to address short-term requirements of any pre-trained RL algorithm. The case studies demonstrate that both our proposed method as well as its practical approximation can achieve short-term and long-term goals without complex reward functions.
A Non-linear Function-on-Function Model for Regression with Time Series Data
Nov 24, 2020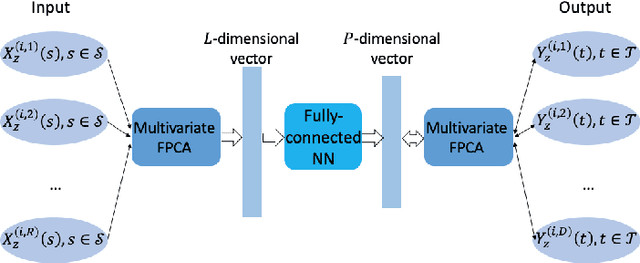
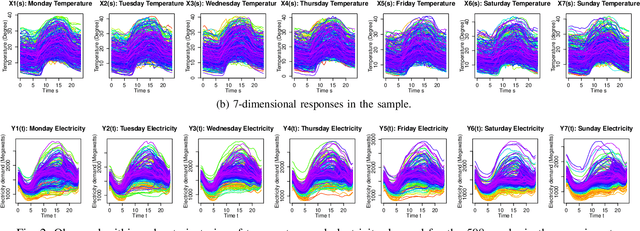
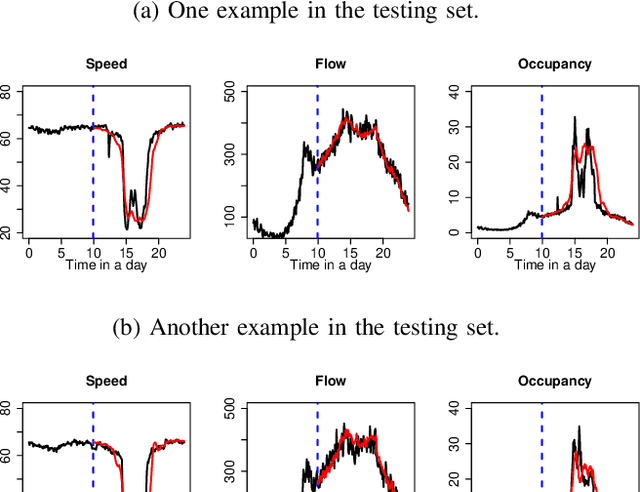

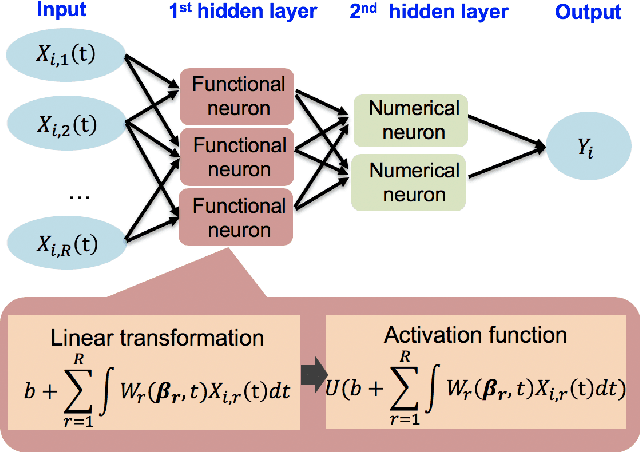
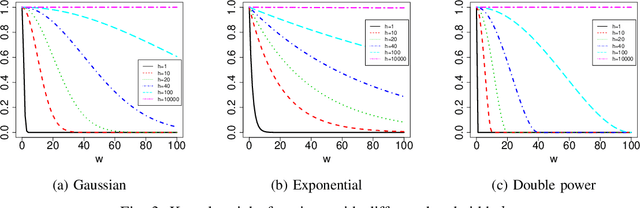
In the last few decades, building regression models for non-scalar variables, including time series, text, image, and video, has attracted increasing interests of researchers from the data analytic community. In this paper, we focus on a multivariate time series regression problem. Specifically, we aim to learn mathematical mappings from multiple chronologically measured numerical variables within a certain time interval S to multiple numerical variables of interest over time interval T. Prior arts, including the multivariate regression model, the Seq2Seq model, and the functional linear models, suffer from several limitations. The first two types of models can only handle regularly observed time series. Besides, the conventional multivariate regression models tend to be biased and inefficient, as they are incapable of encoding the temporal dependencies among observations from the same time series. The sequential learning models explicitly use the same set of parameters along time, which has negative impacts on accuracy. The function-on-function linear model in functional data analysis (a branch of statistics) is insufficient to capture complex correlations among the considered time series and suffer from underfitting easily. In this paper, we propose a general functional mapping that embraces the function-on-function linear model as a special case. We then propose a non-linear function-on-function model using the fully connected neural network to learn the mapping from data, which addresses the aforementioned concerns in the existing approaches. For the proposed model, we describe in detail the corresponding numerical implementation procedures. The effectiveness of the proposed model is demonstrated through the application to two real-world problems.
Challenges of Applying Deep Reinforcement Learning in Dynamic Dispatching
Nov 09, 2020

Dynamic dispatching aims to smartly allocate the right resources to the right place at the right time. Dynamic dispatching is one of the core problems for operations optimization in the mining industry. Theoretically, deep reinforcement learning (RL) should be a natural fit to solve this problem. However, the industry relies on heuristics or even human intuitions, which are often short-sighted and sub-optimal solutions. In this paper, we review the main challenges in using deep RL to address the dynamic dispatching problem in the mining industry.
Spatio-Temporal Functional Neural Networks
Sep 11, 2020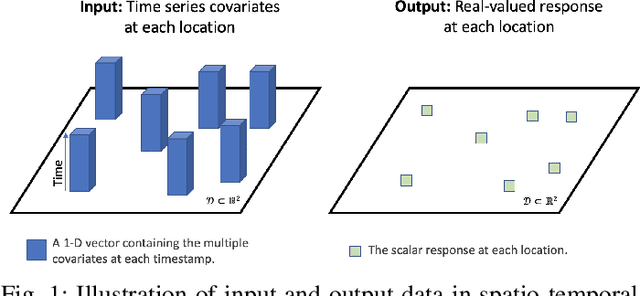
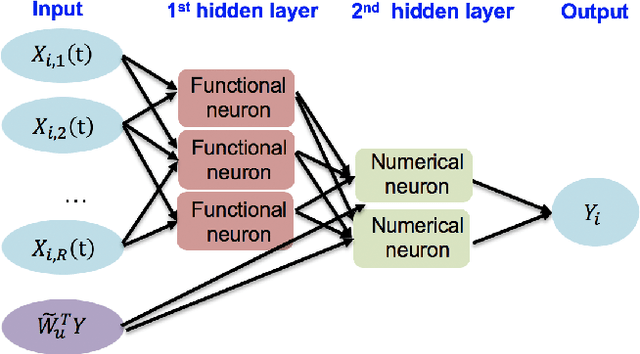
Explosive growth in spatio-temporal data and its wide range of applications have attracted increasing interests of researchers in the statistical and machine learning fields. The spatio-temporal regression problem is of paramount importance from both the methodology development and real-world application perspectives. Given the observed spatially encoded time series covariates and real-valued response data samples, the goal of spatio-temporal regression is to leverage the temporal and spatial dependencies to build a mapping from covariates to response with minimized prediction error. Prior arts, including the convolutional Long Short-Term Memory (CovLSTM) and variations of the functional linear models, cannot learn the spatio-temporal information in a simple and efficient format for proper model building. In this work, we propose two novel extensions of the Functional Neural Network (FNN), a temporal regression model whose effectiveness and superior performance over alternative sequential models have been proven by many researchers. The effectiveness of the proposed spatio-temporal FNNs in handling varying spatial correlations is demonstrated in comprehensive simulation studies. The proposed models are then deployed to solve a practical and challenging precipitation prediction problem in the meteorology field.
Dynamic Dispatching for Large-Scale Heterogeneous Fleet via Multi-agent Deep Reinforcement Learning
Aug 24, 2020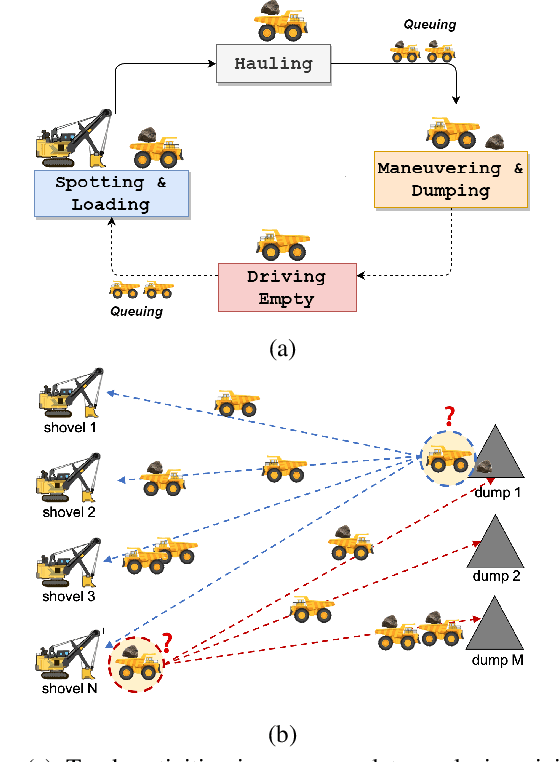
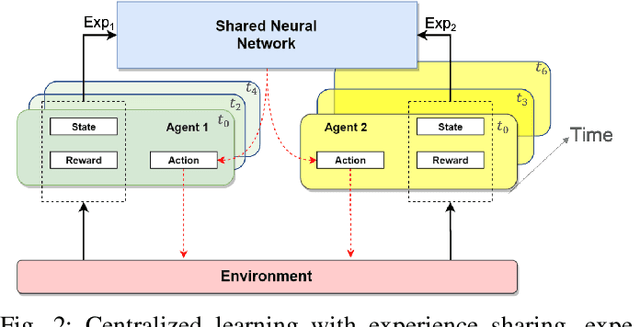
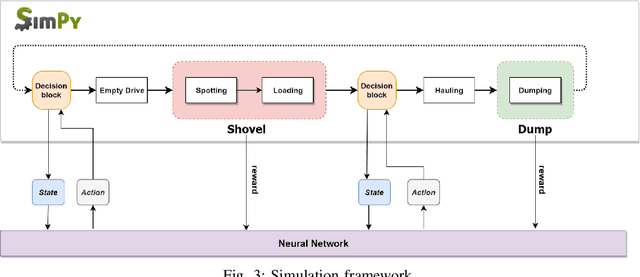
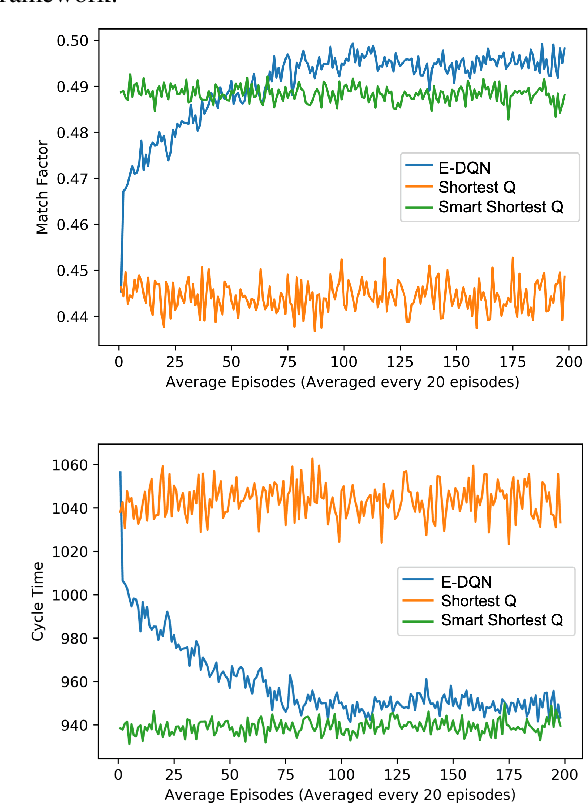
Dynamic dispatching is one of the core problems for operation optimization in traditional industries such as mining, as it is about how to smartly allocate the right resources to the right place at the right time. Conventionally, the industry relies on heuristics or even human intuitions which are often short-sighted and sub-optimal solutions. Leveraging the power of AI and Internet of Things (IoT), data-driven automation is reshaping this area. However, facing its own challenges such as large-scale and heterogenous trucks running in a highly dynamic environment, it can barely adopt methods developed in other domains (e.g., ride-sharing). In this paper, we propose a novel Deep Reinforcement Learning approach to solve the dynamic dispatching problem in mining. We first develop an event-based mining simulator with parameters calibrated in real mines. Then we propose an experience-sharing Deep Q Network with a novel abstract state/action representation to learn memories from heterogeneous agents altogether and realizes learning in a centralized way. We demonstrate that the proposed methods significantly outperform the most widely adopted approaches in the industry by $5.56\%$ in terms of productivity. The proposed approach has great potential in a broader range of industries (e.g., manufacturing, logistics) which have a large-scale of heterogenous equipment working in a highly dynamic environment, as a general framework for dynamic resource allocation.
Comparison of Model Predictive and Reinforcement Learning Methods for Fault Tolerant Control
Aug 10, 2020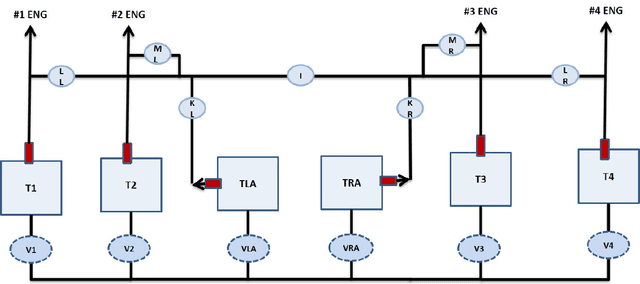
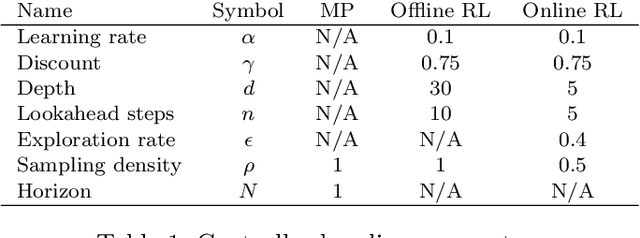
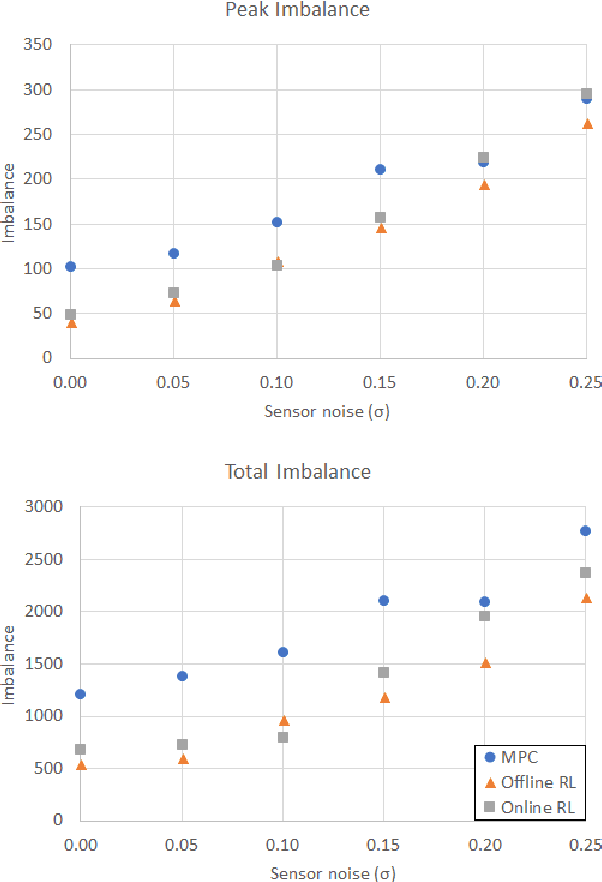
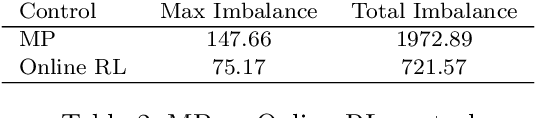
A desirable property in fault-tolerant controllers is adaptability to system changes as they evolve during systems operations. An adaptive controller does not require optimal control policies to be enumerated for possible faults. Instead it can approximate one in real-time. We present two adaptive fault-tolerant control schemes for a discrete time system based on hierarchical reinforcement learning. We compare their performance against a model predictive controller in presence of sensor noise and persistent faults. The controllers are tested on a fuel tank model of a C-130 plane. Our experiments demonstrate that reinforcement learning-based controllers perform more robustly than model predictive controllers under faults, partially observable system models, and varying sensor noise levels.