 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond ZOH: Advanced Discretization Strategies for Vision Mamba
Apr 22, 2026Vision Mamba, as a state space model (SSM), employs a zero-order hold (ZOH) discretization, which assumes that input signals remain constant between sampling instants. This assumption degrades temporal fidelity in dynamic visual environments and constrains the attainable accuracy of modern SSM-based vision models. In this paper, we present a systematic and controlled comparison of six discretization schemes instantiated within the Vision Mamba framework: ZOH, first-order hold (FOH), bilinear/Tustin transform (BIL), polynomial interpolation (POL), higher-order hold (HOH), and the fourth-order Runge-Kutta method (RK4). We evaluate each method on standard visual benchmarks to quantify its influence in image classification, semantic segmentation, and object detection. Our results demonstrate that POL and HOH yield the largest gains in accuracy at the cost of higher training-time computation. In contrast, the BIL provides consistent improvements over ZOH with modest additional overhead, offering the most favorable trade-off between precision and efficiency. These findings elucidate the pivotal role of discretization in SSM-based vision architectures and furnish empirically grounded justification for adopting BIL as the default discretization baseline for state-of-the-art SSM models.
Cooperative Control of Multi-Quadrotors for Transporting Cable-Suspended Payloads: Obstacle-Aware Planning and Event-Based Nonlinear Model Predictive Control
Mar 24, 2025This paper introduces a novel methodology for the cooperative control of multiple quadrotors transporting cablesuspended payloads, emphasizing obstacle-aware planning and event-based Nonlinear Model Predictive Control (NMPC). Our approach integrates trajectory planning with real-time control through a combination of the A* algorithm for global path planning and NMPC for local control, enhancing trajectory adaptability and obstacle avoidance. We propose an advanced event-triggered control system that updates based on events identified through dynamically generated environmental maps. These maps are constructed using a dual-camera setup, which includes multi-camera systems for static obstacle detection and event cameras for high-resolution, low-latency detection of dynamic obstacles. This design is crucial for addressing fast-moving and transient obstacles that conventional cameras may overlook, particularly in environments with rapid motion and variable lighting conditions. When new obstacles are detected, the A* algorithm recalculates waypoints based on the updated map, ensuring safe and efficient navigation. This real-time obstacle detection and map updating integration allows the system to adaptively respond to environmental changes, markedly improving safety and navigation efficiency. The system employs SLAM and object detection techniques utilizing data from multi-cameras, event cameras, and IMUs for accurate localization and comprehensive environmental mapping. The NMPC framework adeptly manages the complex dynamics of multiple quadrotors and suspended payloads, incorporating safety constraints to maintain dynamic feasibility and stability. Extensive simulations validate the proposed approach, demonstrating significant enhancements in energy efficiency, computational resource management, and responsiveness.
A Survey on Mamba Architecture for Vision Applications
Feb 11, 2025Transformers have become foundational for visual tasks such as object detection, semantic segmentation, and video understanding, but their quadratic complexity in attention mechanisms presents scalability challenges. To address these limitations, the Mamba architecture utilizes state-space models (SSMs) for linear scalability, efficient processing, and improved contextual awareness. This paper investigates Mamba architecture for visual domain applications and its recent advancements, including Vision Mamba (ViM) and VideoMamba, which introduce bidirectional scanning, selective scanning mechanisms, and spatiotemporal processing to enhance image and video understanding. Architectural innovations like position embeddings, cross-scan modules, and hierarchical designs further optimize the Mamba framework for global and local feature extraction. These advancements position Mamba as a promising architecture in computer vision research and applications.
Robust Control of An Aerial Manipulator Based on A Variable Inertia Parameters Model
Jan 09, 2024
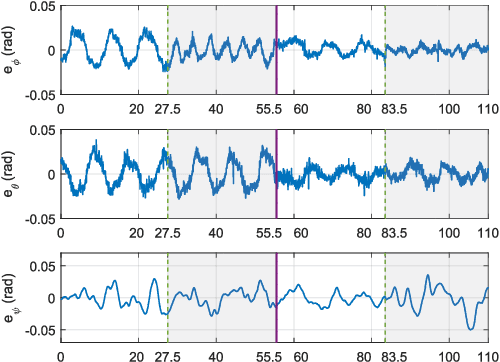
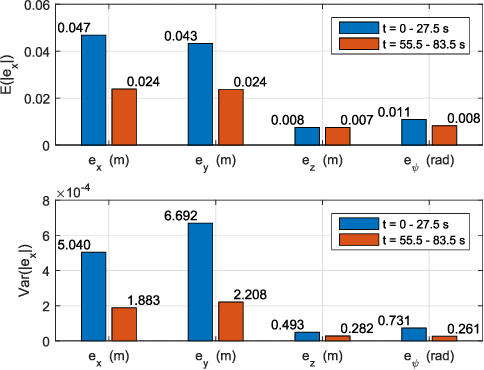
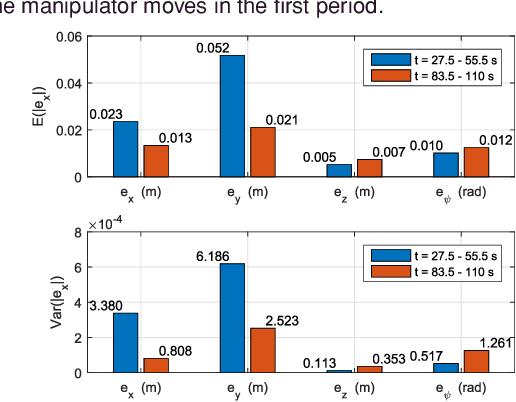
Aerial manipulator, which is composed of an UAV (Unmanned Aerial Vehicle) and a multi-link manipulator and can perform aerial manipulation, has shown great potential of applications. However, dynamic coupling between the UAV and the manipulator makes it difficult to control the aerial manipulator with high performance. In this paper, system modeling and control problem of the aerial manipulator are studied. Firstly, an UAV dynamic model is proposed with consideration of the dynamic coupling from an attached manipulator, which is treated as disturbance for the UAV. In the dynamic model, the disturbance is affected by the variable inertia parameters of the aerial manipulator system. Then, based on the proposed dynamic model, a disturbance compensation robust $H_{\infty}$ controller is designed to stabilize flight of the UAV while the manipulator is in operation. Finally, experiments are conducted and the experimental results demonstrate the feasibility and validity of the proposed control scheme.
Fault Tolerant Free Gait and Footstep Planning for Hexapod Robot Based on Monte-Carlo Tree
Jun 16, 2020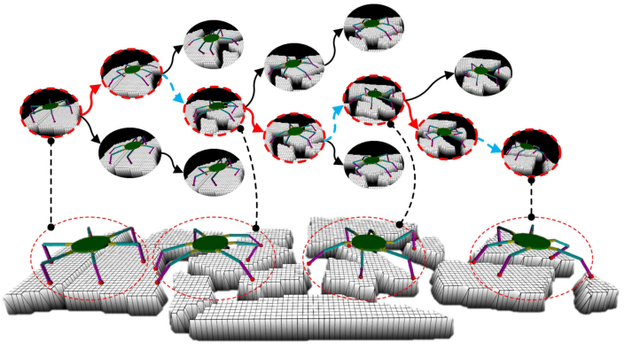
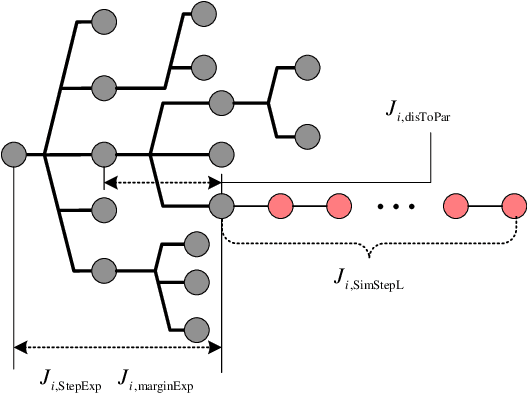
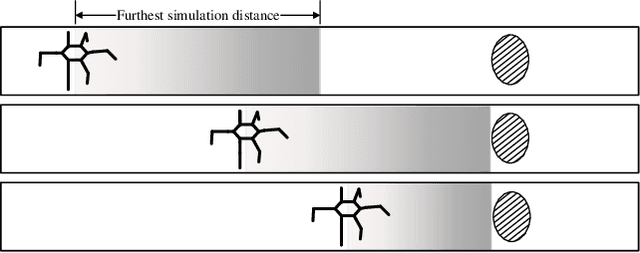

Legged robots can pass through complex field environments by selecting gaits and discrete footholds carefully. Traditional methods plan gait and foothold separately and treat them as the single-step optimal process. However, such processing causes its poor passability in a sparse foothold environment. This paper novelly proposes a coordinative planning method for hexapod robots that regards the planning of gait and foothold as a sequence optimization problem with the consideration of dealing with the harshness of the environment as leg fault. The Monte Carlo tree search algorithm(MCTS) is used to optimize the entire sequence. Two methods, FastMCTS, and SlidingMCTS are proposed to solve some defeats of the standard MCTS applicating in the field of legged robot planning. The proposed planning algorithm combines the fault-tolerant gait method to improve the passability of the algorithm. Finally, compared with other planning methods, experiments on terrains with different densities of footholds and artificially-designed challenging terrain are carried out to verify our methods. All results show that the proposed method dramatically improves the hexapod robot's ability to pass through sparse footholds environment.