 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Control of An Aerial Manipulator Based on A Variable Inertia Parameters Model
Paper and Code
Jan 09, 2024
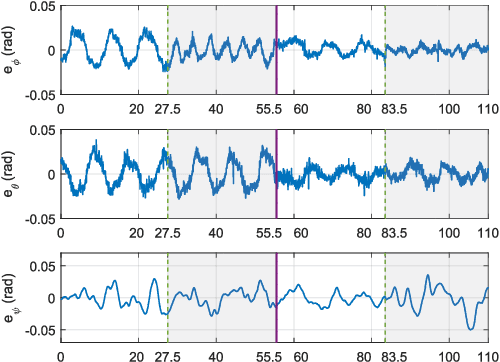
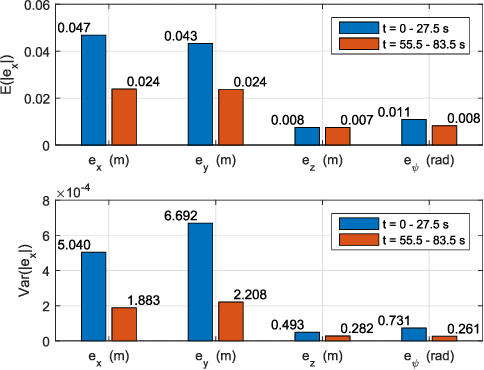
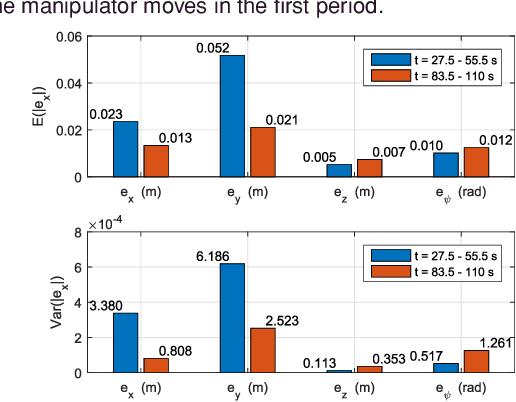
Aerial manipulator, which is composed of an UAV (Unmanned Aerial Vehicle) and a multi-link manipulator and can perform aerial manipulation, has shown great potential of applications. However, dynamic coupling between the UAV and the manipulator makes it difficult to control the aerial manipulator with high performance. In this paper, system modeling and control problem of the aerial manipulator are studied. Firstly, an UAV dynamic model is proposed with consideration of the dynamic coupling from an attached manipulator, which is treated as disturbance for the UAV. In the dynamic model, the disturbance is affected by the variable inertia parameters of the aerial manipulator system. Then, based on the proposed dynamic model, a disturbance compensation robust $H_{\infty}$ controller is designed to stabilize flight of the UAV while the manipulator is in operation. Finally, experiments are conducted and the experimental results demonstrate the feasibility and validity of the proposed control scheme.