 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDRDM: A Disentangled Representations Diffusion Model for Synthesizing Realistic Person Images
Dec 25, 2024Person image synthesis with controllable body poses and appearances is an essential task owing to the practical needs in the context of virtual try-on, image editing and video production. However, existing methods face significant challenges with details missing, limbs distortion and the garment style deviation. To address these issues, we propose a Disentangled Representations Diffusion Model (DRDM) to generate photo-realistic images from source portraits in specific desired poses and appearances. First, a pose encoder is responsible for encoding pose features into a high-dimensional space to guide the generation of person images. Second, a body-part subspace decoupling block (BSDB) disentangles features from the different body parts of a source figure and feeds them to the various layers of the noise prediction block, thereby supplying the network with rich disentangled features for generating a realistic target image. Moreover, during inference, we develop a parsing map-based disentangled classifier-free guided sampling method, which amplifies the conditional signals of texture and pose. Extensive experimental results on the Deepfashion dataset demonstrate the effectiveness of our approach in achieving pose transfer and appearance control.
Contribution of soundscape appropriateness to soundscape quality assessment in space: a mediating variable affecting acoustic comfort
Oct 01, 2024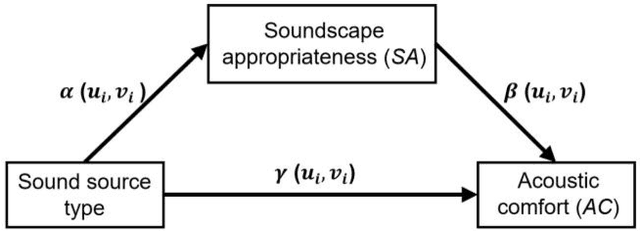
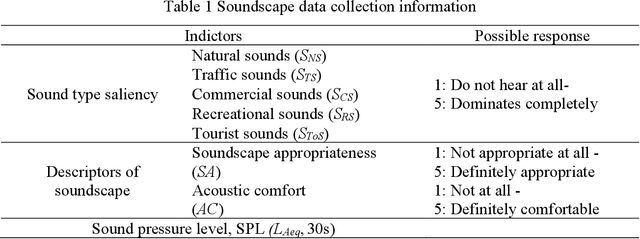
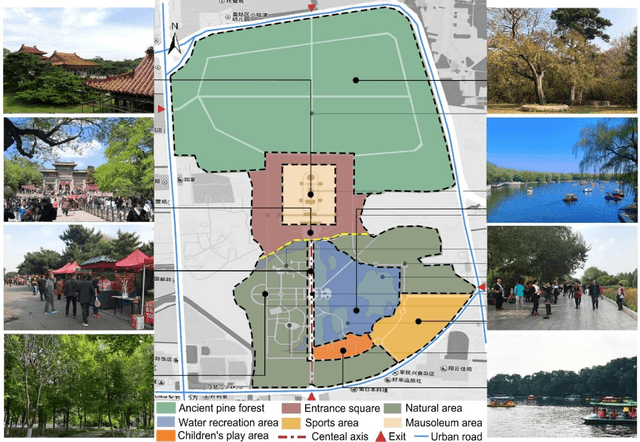
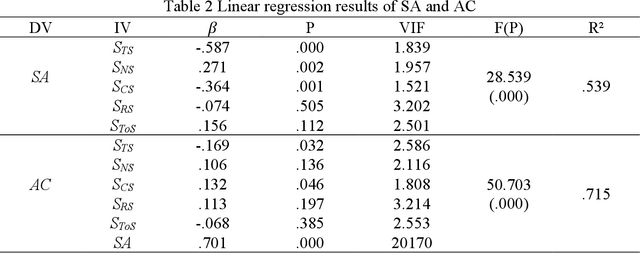
Soundscape appropriateness (SA) provides supplemental information on the matching degree between auditory information and the surrounding scene in soundscape perception. This indicator has been integrated into the standard ISO process for collecting soundscape data, forming a component of the sound quality assessment questionnaire. However, its role in soundscape quality assessment has not been fully understood. Herein, we present the findings from soundscape data collected from Beiling Park in Shenyang, China. A method was developed that integrates mediation effect models with multiscale geographically weighted regression (MGWR) models to explore the mediating role of SA in the impact of sound source types on soundscape quality, as well as the spatial heterogeneity of this mediation effect. The results confirm that SA does mediates the influence of sound source types on acoustics comfort (AC). Specifically, natural sounds (indirect effect / total effect = 0.19 / 0.19), traffic sounds (indirect effect / total effect = -0.46 / -0.65), and commercial sounds (indirect effect / total effect = -0.25 / -0.12) impact the perception of AC by either enhancing or reducing SA. Moreover, the relationships among variables depicted in this model demonstrate spatial heterogeneity, demonstrating that in urban open spaces with complex constructures, local spatial models may be needed for soundscape assessment. The research reaffirms the significance of SA in urban open spaces. In terms of practical implications for urban and landscape planners, when sound sources cannot be controlled or altered, coordinating between the sound and the surrounding environment through landscape optimisation could also improve the quality of the soundscape through enhancing SA and help achieve the goal of creating healthy urban open spaces.
Robust Control of An Aerial Manipulator Based on A Variable Inertia Parameters Model
Jan 09, 2024
Aerial manipulator, which is composed of an UAV (Unmanned Aerial Vehicle) and a multi-link manipulator and can perform aerial manipulation, has shown great potential of applications. However, dynamic coupling between the UAV and the manipulator makes it difficult to control the aerial manipulator with high performance. In this paper, system modeling and control problem of the aerial manipulator are studied. Firstly, an UAV dynamic model is proposed with consideration of the dynamic coupling from an attached manipulator, which is treated as disturbance for the UAV. In the dynamic model, the disturbance is affected by the variable inertia parameters of the aerial manipulator system. Then, based on the proposed dynamic model, a disturbance compensation robust $H_{\infty}$ controller is designed to stabilize flight of the UAV while the manipulator is in operation. Finally, experiments are conducted and the experimental results demonstrate the feasibility and validity of the proposed control scheme.
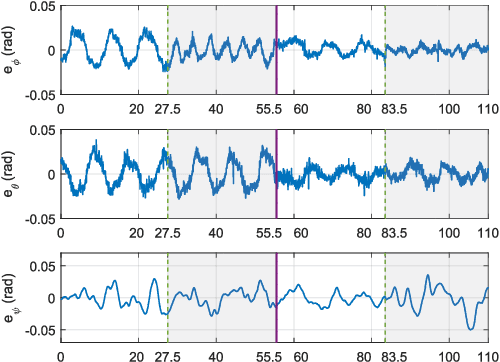
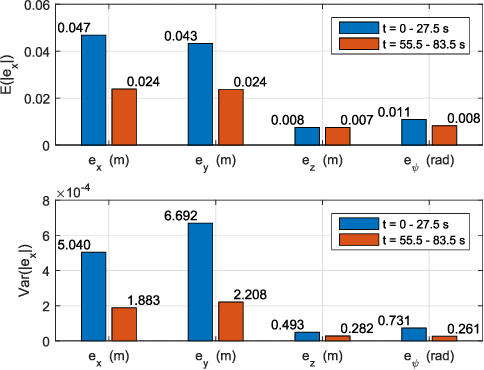
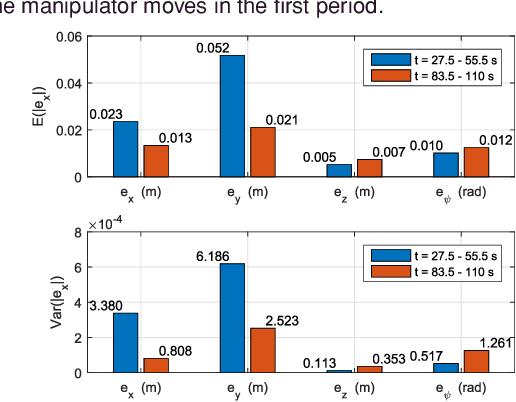
An Aerial Manipulator for Robot-to-robot Torch Relay Task: System Design and Control Scheme
Jan 08, 2024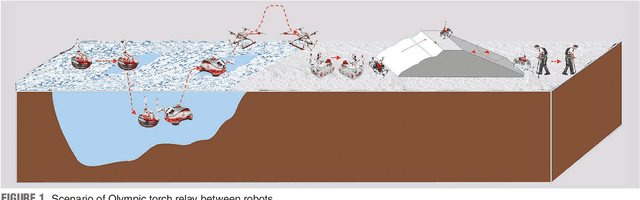
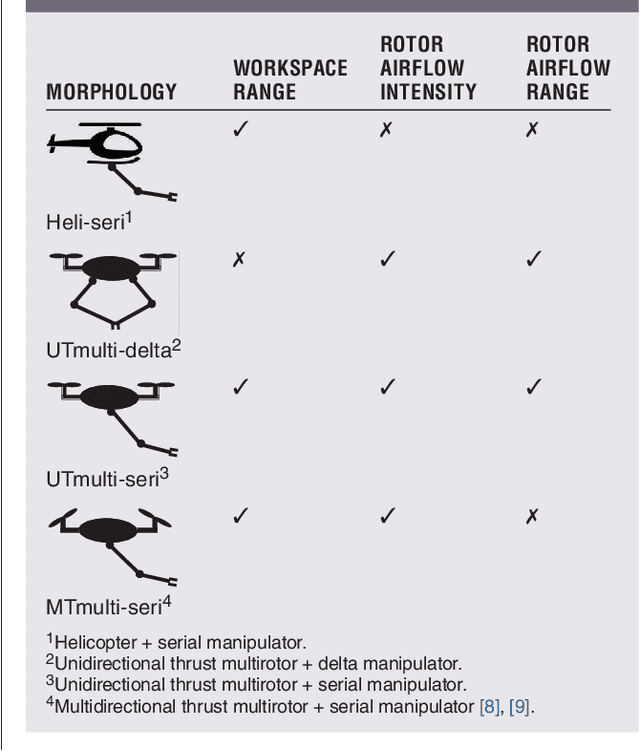
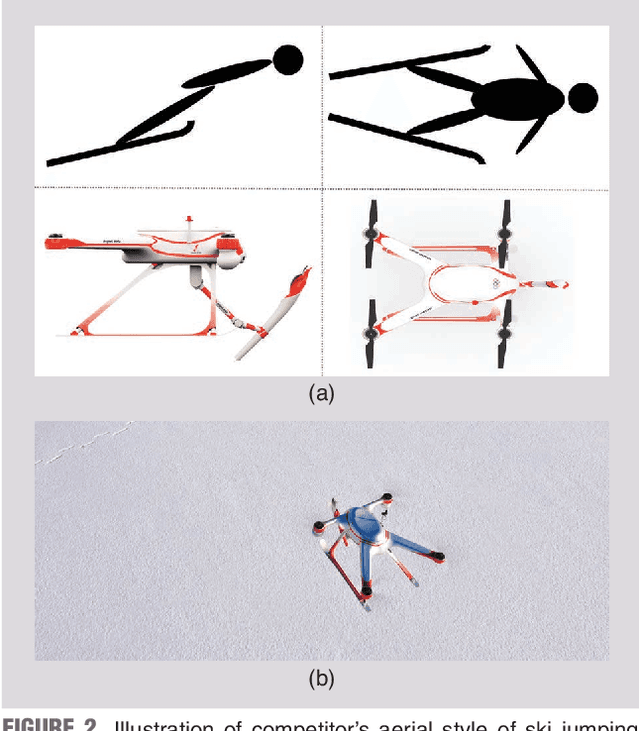
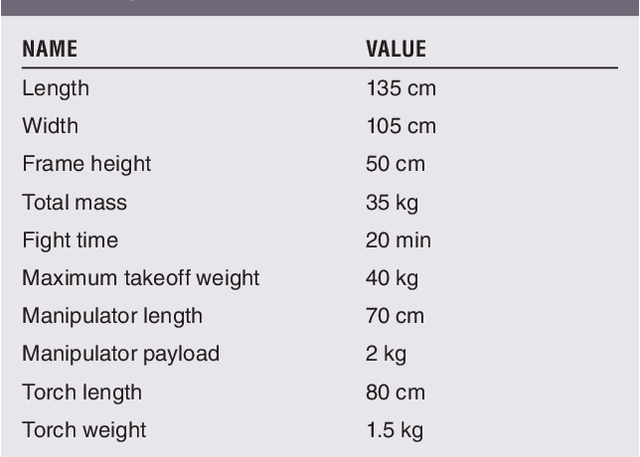
Torch relay is an important tradition of the Olympics and heralds the start of the Games. Robots applied in the torch relay activity can not only demonstrate the technological capability of humans to the world but also provide a sight of human lives with robots in the future. This article presents an aerial manipulator designed for the robot-to-robot torch relay task of the Beijing 2022 Winter Olympics. This aerial manipulator system is composed of a quadrotor, a 3 DoF (Degree of Freedom) manipulator, and a monocular camera. This article primarily describes the system design and system control scheme of the aerial manipulator. The experimental results demonstrate that it can complete robot-to-robot torch relay task under the guidance of vision in the ice and snow field.
Guided Time-optimal Model Predictive Control of a Multi-rotor
Jan 08, 2024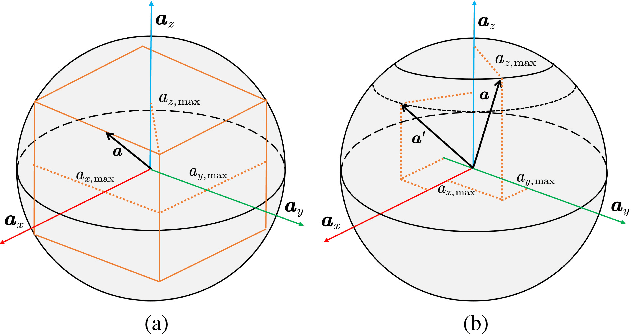

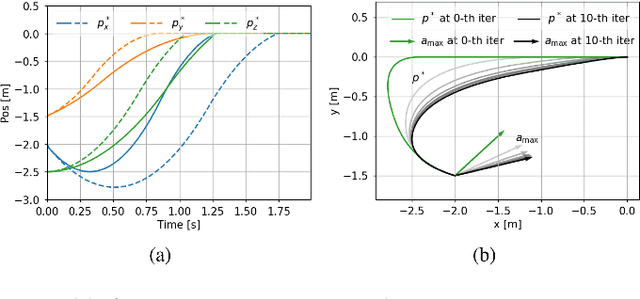
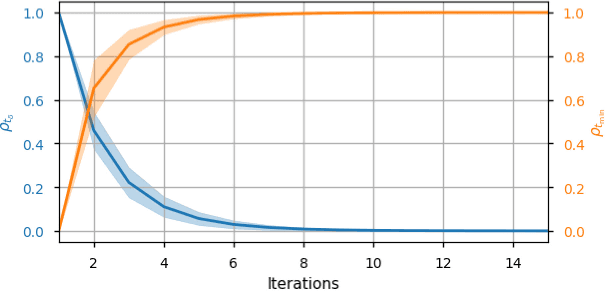
Time-optimal control of a multi-rotor remains an open problem due to the under-actuation and nonlinearity of its dynamics, which make it difficult to solve this problem directly. In this paper, the time-optimal control problem of the multi-rotor is studied. Firstly, a thrust limit optimal decomposition method is proposed, which can reasonably decompose the limited thrust into three directions according to the current state and the target state. As a result, the thrust limit constraint is decomposed as a linear constraint. With the linear constraint and decoupled dynamics, a time-optimal guidance trajectory can be obtained. Then, a cost function is defined based on the time-optimal guidance trajectory, which has a quadratic form and can be used to evaluate the time-optimal performance of the system outputs. Finally, based on the cost function, the time-optimal control problem is reformulated as an MPC (Model Predictive Control) problem. The experimental results demonstrate the feasibility and validity of the proposed methods.
* 6 pages, 5 figures