 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGuided Time-optimal Model Predictive Control of a Multi-rotor
Jan 08, 2024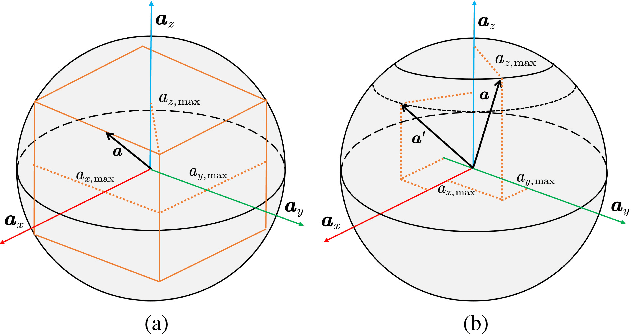

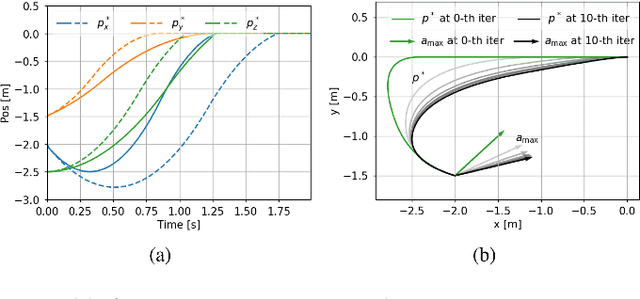
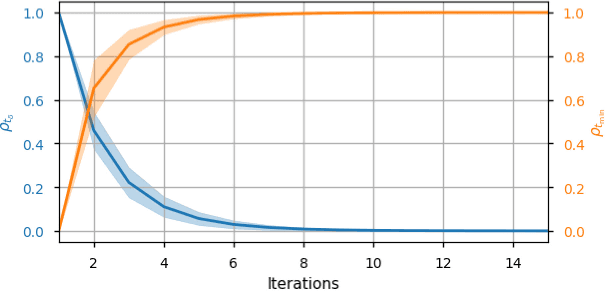
Time-optimal control of a multi-rotor remains an open problem due to the under-actuation and nonlinearity of its dynamics, which make it difficult to solve this problem directly. In this paper, the time-optimal control problem of the multi-rotor is studied. Firstly, a thrust limit optimal decomposition method is proposed, which can reasonably decompose the limited thrust into three directions according to the current state and the target state. As a result, the thrust limit constraint is decomposed as a linear constraint. With the linear constraint and decoupled dynamics, a time-optimal guidance trajectory can be obtained. Then, a cost function is defined based on the time-optimal guidance trajectory, which has a quadratic form and can be used to evaluate the time-optimal performance of the system outputs. Finally, based on the cost function, the time-optimal control problem is reformulated as an MPC (Model Predictive Control) problem. The experimental results demonstrate the feasibility and validity of the proposed methods.
* 6 pages, 5 figures
An Aerial Manipulator for Robot-to-robot Torch Relay Task: System Design and Control Scheme
Jan 08, 2024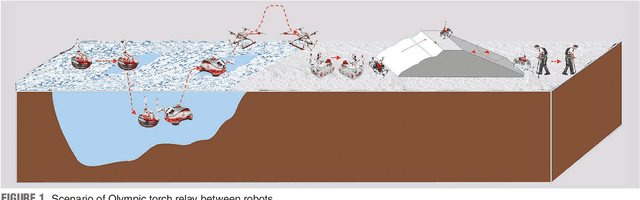
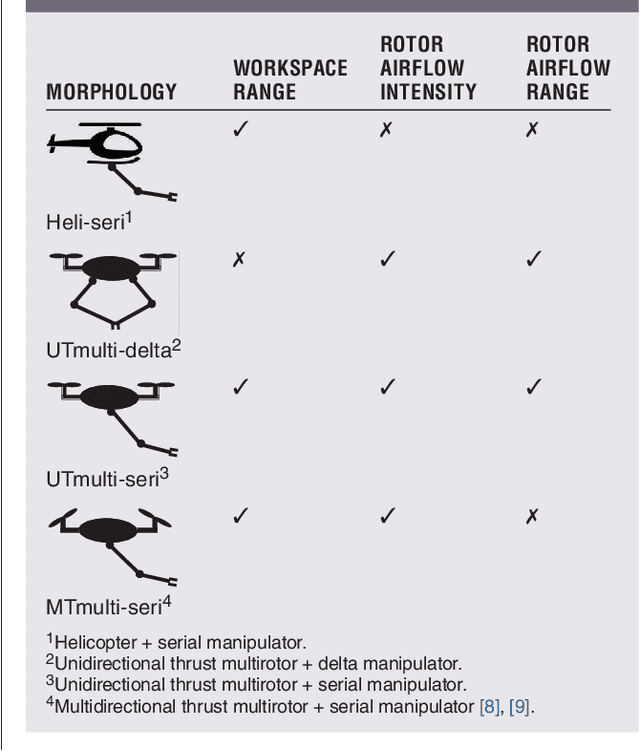
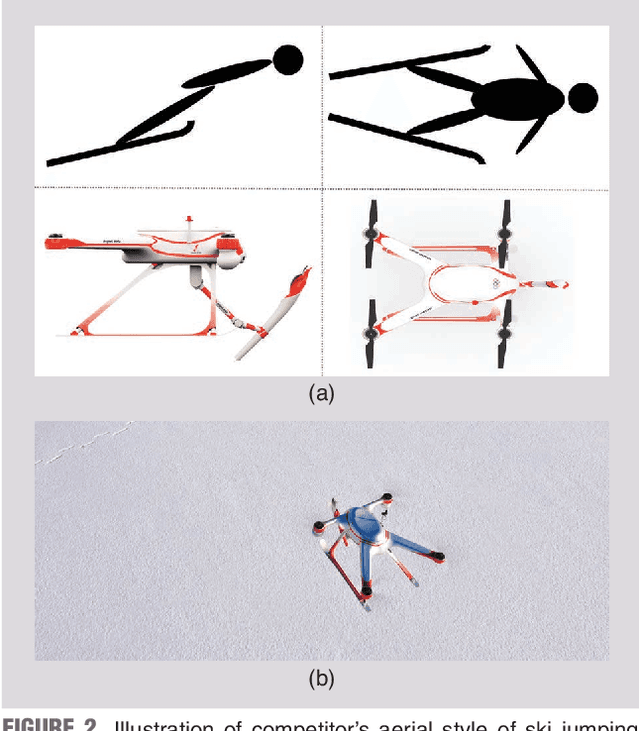
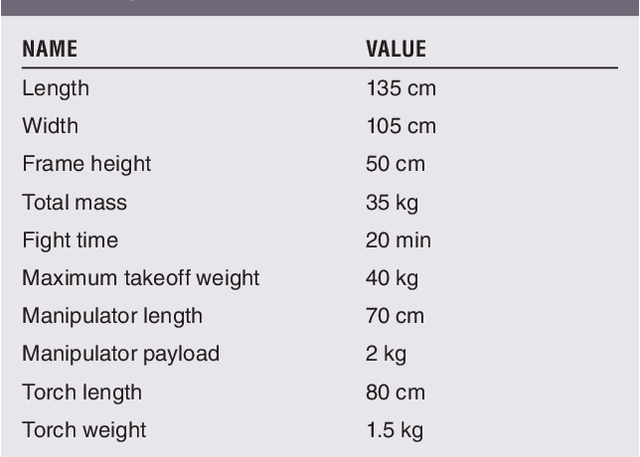
Torch relay is an important tradition of the Olympics and heralds the start of the Games. Robots applied in the torch relay activity can not only demonstrate the technological capability of humans to the world but also provide a sight of human lives with robots in the future. This article presents an aerial manipulator designed for the robot-to-robot torch relay task of the Beijing 2022 Winter Olympics. This aerial manipulator system is composed of a quadrotor, a 3 DoF (Degree of Freedom) manipulator, and a monocular camera. This article primarily describes the system design and system control scheme of the aerial manipulator. The experimental results demonstrate that it can complete robot-to-robot torch relay task under the guidance of vision in the ice and snow field.