 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGuided Time-optimal Model Predictive Control of a Multi-rotor
Jan 08, 2024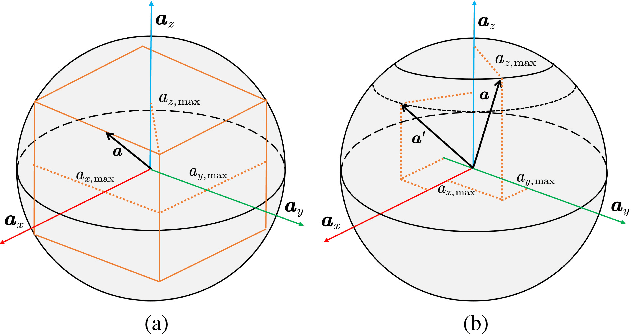

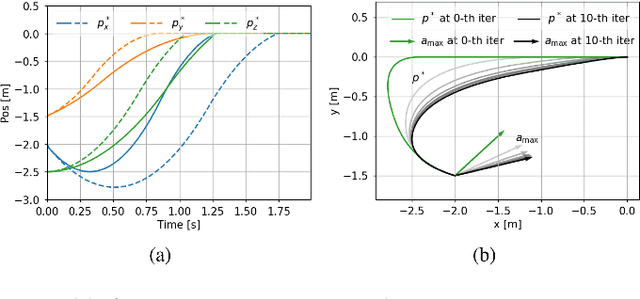
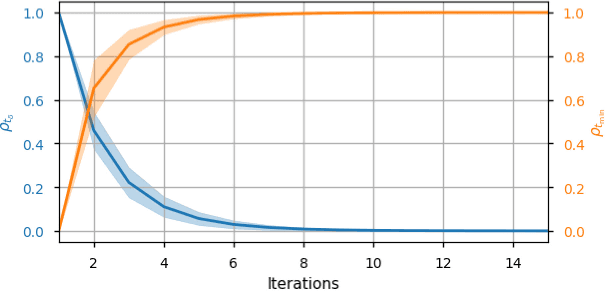
Time-optimal control of a multi-rotor remains an open problem due to the under-actuation and nonlinearity of its dynamics, which make it difficult to solve this problem directly. In this paper, the time-optimal control problem of the multi-rotor is studied. Firstly, a thrust limit optimal decomposition method is proposed, which can reasonably decompose the limited thrust into three directions according to the current state and the target state. As a result, the thrust limit constraint is decomposed as a linear constraint. With the linear constraint and decoupled dynamics, a time-optimal guidance trajectory can be obtained. Then, a cost function is defined based on the time-optimal guidance trajectory, which has a quadratic form and can be used to evaluate the time-optimal performance of the system outputs. Finally, based on the cost function, the time-optimal control problem is reformulated as an MPC (Model Predictive Control) problem. The experimental results demonstrate the feasibility and validity of the proposed methods.
* 6 pages, 5 figures