 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafeFlowMPC: Predictive and Safe Trajectory Planning for Robot Manipulators with Learning-based Policies
Feb 17, 2026The emerging integration of robots into everyday life brings several major challenges. Compared to classical industrial applications, more flexibility is needed in combination with real-time reactivity. Learning-based methods can train powerful policies based on demonstrated trajectories, such that the robot generalizes a task to similar situations. However, these black-box models lack interpretability and rigorous safety guarantees. Optimization-based methods provide these guarantees but lack the required flexibility and generalization capabilities. This work proposes SafeFlowMPC, a combination of flow matching and online optimization to combine the strengths of learning and optimization. This method guarantees safety at all times and is designed to meet the demands of real-time execution by using a suboptimal model-predictive control formulation. SafeFlowMPC achieves strong performance in three real-world experiments on a KUKA 7-DoF manipulator, namely two grasping experiment and a dynamic human-robot object handover experiment. A video of the experiments is available at http://www.acin.tuwien.ac.at/42d6. The code is available at https://github.com/TU-Wien-ACIN-CDS/SafeFlowMPC.
GPU-Accelerated Motion Planning of an Underactuated Forestry Crane in Cluttered Environments
Mar 18, 2025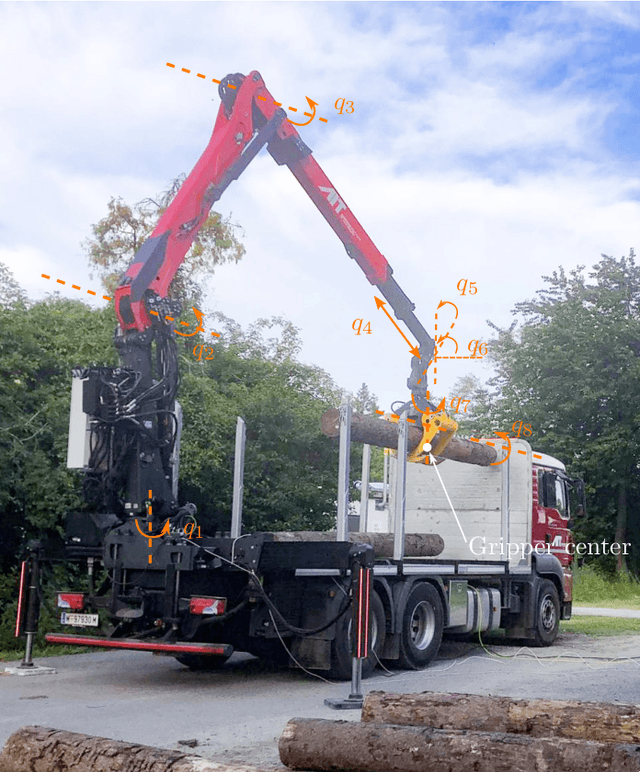



Autonomous large-scale machine operations require fast, efficient, and collision-free motion planning while addressing unique challenges such as hydraulic actuation limits and underactuated joint dynamics. This paper presents a novel two-step motion planning framework designed for an underactuated forestry crane. The first step employs GPU-accelerated stochastic optimization to rapidly compute a globally shortest collision-free path. The second step refines this path into a dynamically feasible trajectory using a trajectory optimizer that ensures compliance with system dynamics and actuation constraints. The proposed approach is benchmarked against conventional techniques, including RRT-based methods and purely optimization-based approaches. Simulation results demonstrate substantial improvements in computation speed and motion feasibility, making this method highly suitable for complex crane systems.
Towards Autonomous Wood-Log Grasping with a Forestry Crane: Simulator and Benchmarking
Feb 03, 2025



Forestry machines operated in forest production environments face challenges when performing manipulation tasks, especially regarding the complicated dynamics of underactuated crane systems and the heavy weight of logs to be grasped. This study investigates the feasibility of using reinforcement learning for forestry crane manipulators in grasping and lifting heavy wood logs autonomously. We first build a simulator using Mujoco physics engine to create realistic scenarios, including modeling a forestry crane with 8 degrees of freedom from CAD data and wood logs of different sizes. We further implement a velocity controller for autonomous log grasping with deep reinforcement learning using a curriculum strategy. Utilizing our new simulator, the proposed control strategy exhibits a success rate of 96% when grasping logs of different diameters and under random initial configurations of the forestry crane. In addition, reward functions and reinforcement learning baselines are implemented to provide an open-source benchmark for the community in large-scale manipulation tasks. A video with several demonstrations can be seen at https://www.acin.tuwien.ac.at/en/d18a/
Language-Driven Closed-Loop Grasping with Model-Predictive Trajectory Replanning
Jun 14, 2024



Combining a vision module inside a closed-loop control system for a \emph{seamless movement} of a robot in a manipulation task is challenging due to the inconsistent update rates between utilized modules. This task is even more difficult in a dynamic environment, e.g., objects are moving. This paper presents a \emph{modular} zero-shot framework for language-driven manipulation of (dynamic) objects through a closed-loop control system with real-time trajectory replanning and an online 6D object pose localization. We segment an object within $\SI{0.5}{\second}$ by leveraging a vision language model via language commands. Then, guided by natural language commands, a closed-loop system, including a unified pose estimation and tracking and online trajectory planning, is utilized to continuously track this object and compute the optimal trajectory in real-time. Our proposed zero-shot framework provides a smooth trajectory that avoids jerky movements and ensures the robot can grasp a non-stationary object. Experiment results exhibit the real-time capability of the proposed zero-shot modular framework for the trajectory optimization module to accurately and efficiently grasp moving objects, i.e., up to \SI{30}{\hertz} update rates for the online 6D pose localization module and \SI{10}{\hertz} update rates for the receding-horizon trajectory optimization. These advantages highlight the modular framework's potential applications in robotics and human-robot interaction; see the video in https://www.acin.tuwien.ac.at/en/6e64/.
Real-time 6-DoF Pose Estimation by an Event-based Camera using Active LED Markers
Oct 25, 2023



Real-time applications for autonomous operations depend largely on fast and robust vision-based localization systems. Since image processing tasks require processing large amounts of data, the computational resources often limit the performance of other processes. To overcome this limitation, traditional marker-based localization systems are widely used since they are easy to integrate and achieve reliable accuracy. However, classical marker-based localization systems significantly depend on standard cameras with low frame rates, which often lack accuracy due to motion blur. In contrast, event-based cameras provide high temporal resolution and a high dynamic range, which can be utilized for fast localization tasks, even under challenging visual conditions. This paper proposes a simple but effective event-based pose estimation system using active LED markers (ALM) for fast and accurate pose estimation. The proposed algorithm is able to operate in real time with a latency below \SI{0.5}{\milli\second} while maintaining output rates of \SI{3}{\kilo \hertz}. Experimental results in static and dynamic scenarios are presented to demonstrate the performance of the proposed approach in terms of computational speed and absolute accuracy, using the OptiTrack system as the basis for measurement.