 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Collision Detection for Long and Slender Robotic Links in Euclidean Distance Fields: Application to a Forestry Crane
Jul 02, 2025
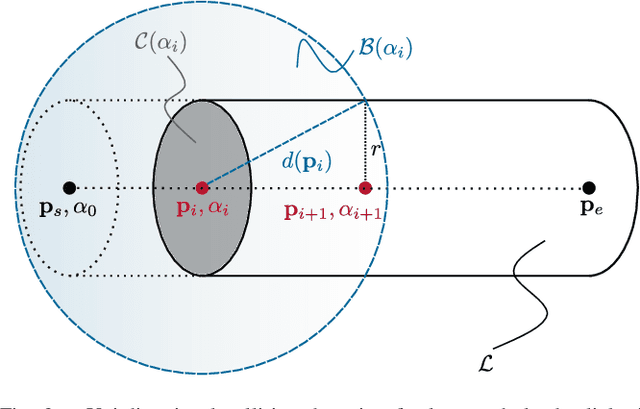
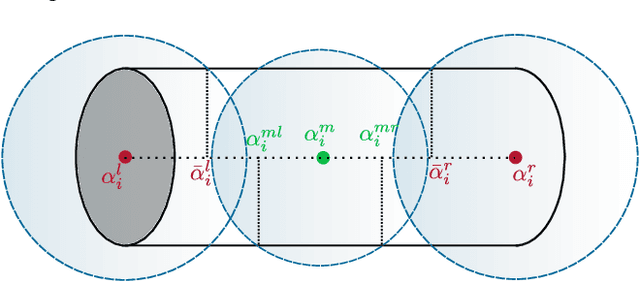
Collision-free motion planning in complex outdoor environments relies heavily on perceiving the surroundings through exteroceptive sensors. A widely used approach represents the environment as a voxelized Euclidean distance field, where robots are typically approximated by spheres. However, for large-scale manipulators such as forestry cranes, which feature long and slender links, this conventional spherical approximation becomes inefficient and inaccurate. This work presents a novel collision detection algorithm specifically designed to exploit the elongated structure of such manipulators, significantly enhancing the computational efficiency of motion planning algorithms. Unlike traditional sphere decomposition methods, our approach not only improves computational efficiency but also naturally eliminates the need to fine-tune the approximation accuracy as an additional parameter. We validate the algorithm's effectiveness using real-world LiDAR data from a forestry crane application, as well as simulated environment data.
GPU-Accelerated Motion Planning of an Underactuated Forestry Crane in Cluttered Environments
Mar 18, 2025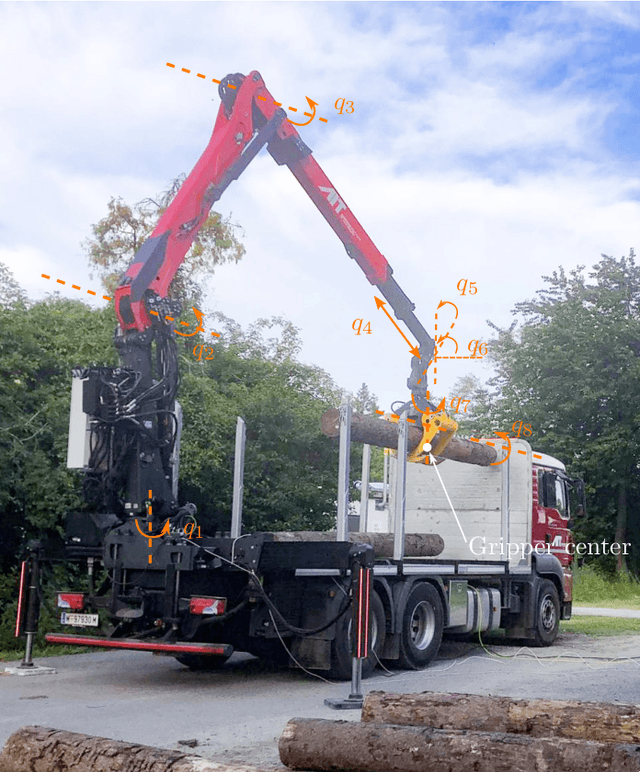



Autonomous large-scale machine operations require fast, efficient, and collision-free motion planning while addressing unique challenges such as hydraulic actuation limits and underactuated joint dynamics. This paper presents a novel two-step motion planning framework designed for an underactuated forestry crane. The first step employs GPU-accelerated stochastic optimization to rapidly compute a globally shortest collision-free path. The second step refines this path into a dynamically feasible trajectory using a trajectory optimizer that ensures compliance with system dynamics and actuation constraints. The proposed approach is benchmarked against conventional techniques, including RRT-based methods and purely optimization-based approaches. Simulation results demonstrate substantial improvements in computation speed and motion feasibility, making this method highly suitable for complex crane systems.
Towards Autonomous Wood-Log Grasping with a Forestry Crane: Simulator and Benchmarking
Feb 03, 2025



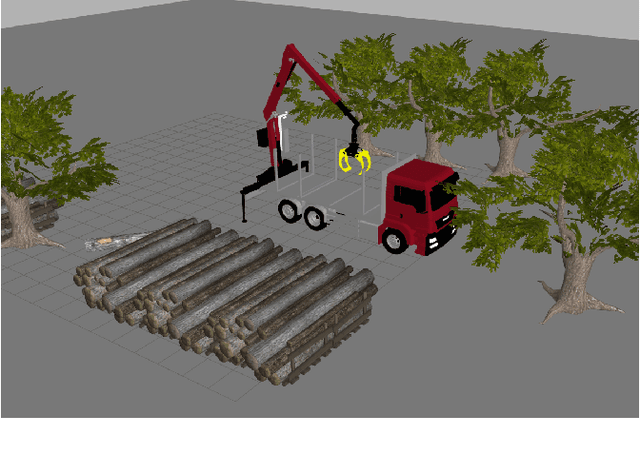
Forestry machines operated in forest production environments face challenges when performing manipulation tasks, especially regarding the complicated dynamics of underactuated crane systems and the heavy weight of logs to be grasped. This study investigates the feasibility of using reinforcement learning for forestry crane manipulators in grasping and lifting heavy wood logs autonomously. We first build a simulator using Mujoco physics engine to create realistic scenarios, including modeling a forestry crane with 8 degrees of freedom from CAD data and wood logs of different sizes. We further implement a velocity controller for autonomous log grasping with deep reinforcement learning using a curriculum strategy. Utilizing our new simulator, the proposed control strategy exhibits a success rate of 96% when grasping logs of different diameters and under random initial configurations of the forestry crane. In addition, reward functions and reinforcement learning baselines are implemented to provide an open-source benchmark for the community in large-scale manipulation tasks. A video with several demonstrations can be seen at https://www.acin.tuwien.ac.at/en/d18a/