 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Collision Detection for Long and Slender Robotic Links in Euclidean Distance Fields: Application to a Forestry Crane
Jul 02, 2025
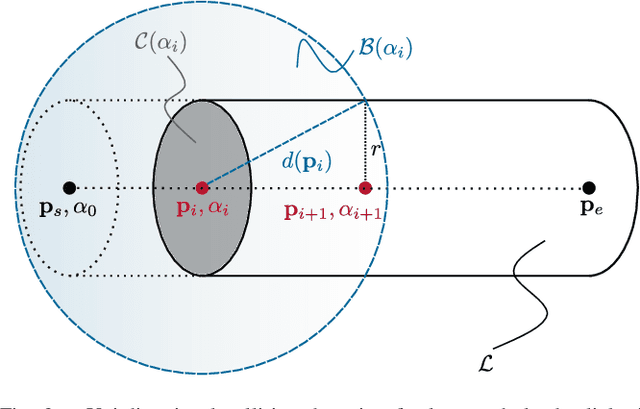
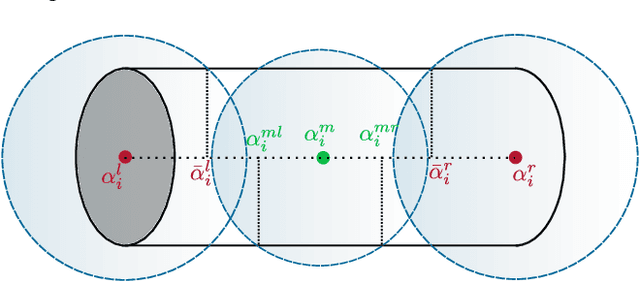
Collision-free motion planning in complex outdoor environments relies heavily on perceiving the surroundings through exteroceptive sensors. A widely used approach represents the environment as a voxelized Euclidean distance field, where robots are typically approximated by spheres. However, for large-scale manipulators such as forestry cranes, which feature long and slender links, this conventional spherical approximation becomes inefficient and inaccurate. This work presents a novel collision detection algorithm specifically designed to exploit the elongated structure of such manipulators, significantly enhancing the computational efficiency of motion planning algorithms. Unlike traditional sphere decomposition methods, our approach not only improves computational efficiency but also naturally eliminates the need to fine-tune the approximation accuracy as an additional parameter. We validate the algorithm's effectiveness using real-world LiDAR data from a forestry crane application, as well as simulated environment data.
ADAPT: An Autonomous Forklift for Construction Site Operation
Mar 18, 2025

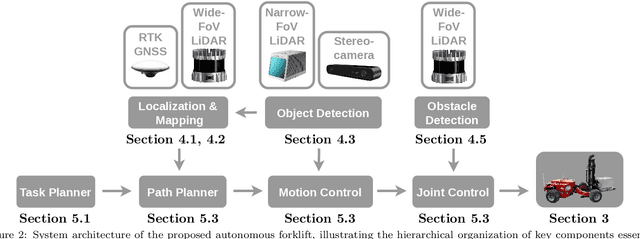

Efficient material logistics play a critical role in controlling costs and schedules in the construction industry. However, manual material handling remains prone to inefficiencies, delays, and safety risks. Autonomous forklifts offer a promising solution to streamline on-site logistics, reducing reliance on human operators and mitigating labor shortages. This paper presents the development and evaluation of the Autonomous Dynamic All-terrain Pallet Transporter (ADAPT), a fully autonomous off-road forklift designed for construction environments. Unlike structured warehouse settings, construction sites pose significant challenges, including dynamic obstacles, unstructured terrain, and varying weather conditions. To address these challenges, our system integrates AI-driven perception techniques with traditional approaches for decision making, planning, and control, enabling reliable operation in complex environments. We validate the system through extensive real-world testing, comparing its long-term performance against an experienced human operator across various weather conditions. We also provide a comprehensive analysis of challenges and key lessons learned, contributing to the advancement of autonomous heavy machinery. Our findings demonstrate that autonomous outdoor forklifts can operate near human-level performance, offering a viable path toward safer and more efficient construction logistics.
Towards Autonomous Wood-Log Grasping with a Forestry Crane: Simulator and Benchmarking
Feb 03, 2025



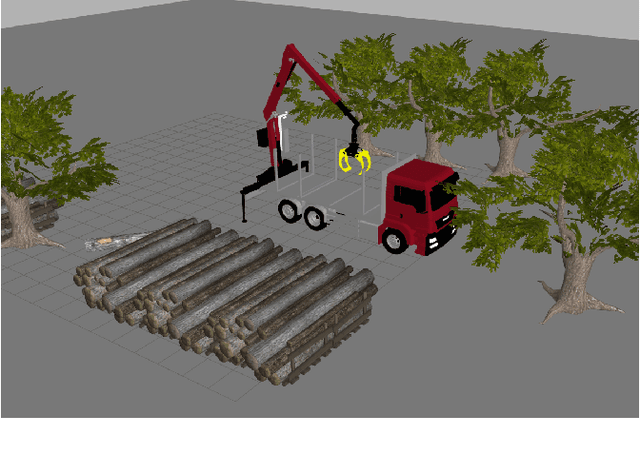
Forestry machines operated in forest production environments face challenges when performing manipulation tasks, especially regarding the complicated dynamics of underactuated crane systems and the heavy weight of logs to be grasped. This study investigates the feasibility of using reinforcement learning for forestry crane manipulators in grasping and lifting heavy wood logs autonomously. We first build a simulator using Mujoco physics engine to create realistic scenarios, including modeling a forestry crane with 8 degrees of freedom from CAD data and wood logs of different sizes. We further implement a velocity controller for autonomous log grasping with deep reinforcement learning using a curriculum strategy. Utilizing our new simulator, the proposed control strategy exhibits a success rate of 96% when grasping logs of different diameters and under random initial configurations of the forestry crane. In addition, reward functions and reinforcement learning baselines are implemented to provide an open-source benchmark for the community in large-scale manipulation tasks. A video with several demonstrations can be seen at https://www.acin.tuwien.ac.at/en/d18a/