 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePIRATR: Parametric Object Inference for Robotic Applications with Transformers in 3D Point Clouds
Feb 05, 2026We present PIRATR, an end-to-end 3D object detection framework for robotic use cases in point clouds. Extending PI3DETR, our method streamlines parametric 3D object detection by jointly estimating multi-class 6-DoF poses and class-specific parametric attributes directly from occlusion-affected point cloud data. This formulation enables not only geometric localization but also the estimation of task-relevant properties for parametric objects, such as a gripper's opening, where the 3D model is adjusted according to simple, predefined rules. The architecture employs modular, class-specific heads, making it straightforward to extend to novel object types without re-designing the pipeline. We validate PIRATR on an automated forklift platform, focusing on three structurally and functionally diverse categories: crane grippers, loading platforms, and pallets. Trained entirely in a synthetic environment, PIRATR generalizes effectively to real outdoor LiDAR scans, achieving a detection mAP of 0.919 without additional fine-tuning. PIRATR establishes a new paradigm of pose-aware, parameterized perception. This bridges the gap between low-level geometric reasoning and actionable world models, paving the way for scalable, simulation-trained perception systems that can be deployed in dynamic robotic environments. Code available at https://github.com/swingaxe/piratr.
ADAPT: An Autonomous Forklift for Construction Site Operation
Mar 18, 2025

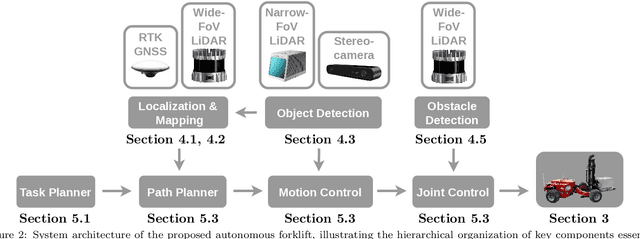

Efficient material logistics play a critical role in controlling costs and schedules in the construction industry. However, manual material handling remains prone to inefficiencies, delays, and safety risks. Autonomous forklifts offer a promising solution to streamline on-site logistics, reducing reliance on human operators and mitigating labor shortages. This paper presents the development and evaluation of the Autonomous Dynamic All-terrain Pallet Transporter (ADAPT), a fully autonomous off-road forklift designed for construction environments. Unlike structured warehouse settings, construction sites pose significant challenges, including dynamic obstacles, unstructured terrain, and varying weather conditions. To address these challenges, our system integrates AI-driven perception techniques with traditional approaches for decision making, planning, and control, enabling reliable operation in complex environments. We validate the system through extensive real-world testing, comparing its long-term performance against an experienced human operator across various weather conditions. We also provide a comprehensive analysis of challenges and key lessons learned, contributing to the advancement of autonomous heavy machinery. Our findings demonstrate that autonomous outdoor forklifts can operate near human-level performance, offering a viable path toward safer and more efficient construction logistics.