 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeADAPT: An Autonomous Forklift for Construction Site Operation
Mar 18, 2025

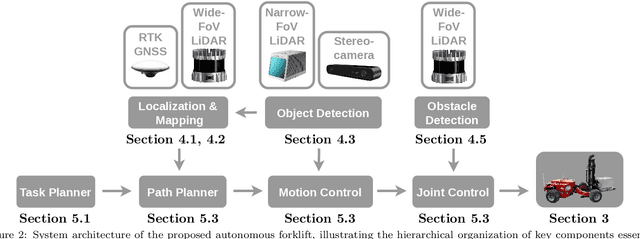

Efficient material logistics play a critical role in controlling costs and schedules in the construction industry. However, manual material handling remains prone to inefficiencies, delays, and safety risks. Autonomous forklifts offer a promising solution to streamline on-site logistics, reducing reliance on human operators and mitigating labor shortages. This paper presents the development and evaluation of the Autonomous Dynamic All-terrain Pallet Transporter (ADAPT), a fully autonomous off-road forklift designed for construction environments. Unlike structured warehouse settings, construction sites pose significant challenges, including dynamic obstacles, unstructured terrain, and varying weather conditions. To address these challenges, our system integrates AI-driven perception techniques with traditional approaches for decision making, planning, and control, enabling reliable operation in complex environments. We validate the system through extensive real-world testing, comparing its long-term performance against an experienced human operator across various weather conditions. We also provide a comprehensive analysis of challenges and key lessons learned, contributing to the advancement of autonomous heavy machinery. Our findings demonstrate that autonomous outdoor forklifts can operate near human-level performance, offering a viable path toward safer and more efficient construction logistics.
Continuous Target-free Extrinsic Calibration of a Multi-Sensor System from a Sequence of Static Viewpoints
Jul 08, 2022



Mobile robotic applications need precise information about the geometric position of the individual sensors on the platform. This information is given by the extrinsic calibration parameters which define how the sensor is rotated and translated with respect to a fixed reference coordinate system. Erroneous calibration parameters have a negative impact on typical robotic estimation tasks, e.g. SLAM. In this work we propose a new method for a continuous estimation of the calibration parameters during operation of the robot. The parameter estimation is based on the matching of point clouds which are acquired by the sensors from multiple static viewpoints. Consequently, our method does not need any special calibration targets and is applicable to any sensor whose measurements can be converted to point clouds. We demonstrate the suitability of our method by calibrating a multi-sensor system composed by 2 lidar sensors, 3 cameras, and an imaging radar sensor.