 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
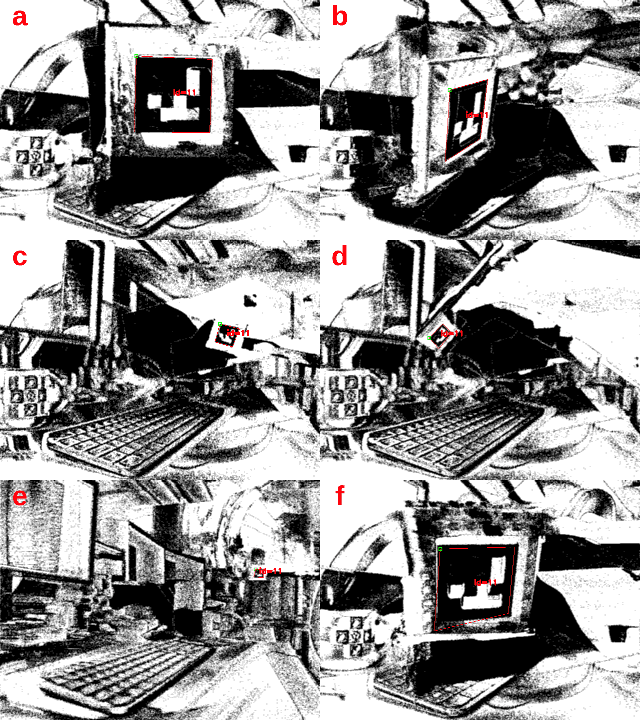
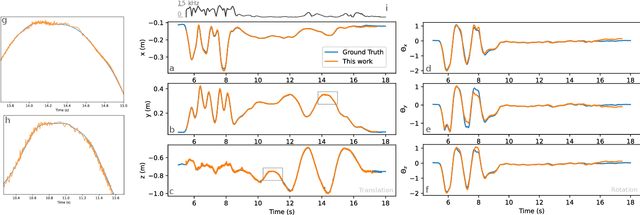
Add to EdgeReal-time 6-DoF Pose Estimation by an Event-based Camera using Active LED Markers
Oct 25, 2023



Real-time applications for autonomous operations depend largely on fast and robust vision-based localization systems. Since image processing tasks require processing large amounts of data, the computational resources often limit the performance of other processes. To overcome this limitation, traditional marker-based localization systems are widely used since they are easy to integrate and achieve reliable accuracy. However, classical marker-based localization systems significantly depend on standard cameras with low frame rates, which often lack accuracy due to motion blur. In contrast, event-based cameras provide high temporal resolution and a high dynamic range, which can be utilized for fast localization tasks, even under challenging visual conditions. This paper proposes a simple but effective event-based pose estimation system using active LED markers (ALM) for fast and accurate pose estimation. The proposed algorithm is able to operate in real time with a latency below \SI{0.5}{\milli\second} while maintaining output rates of \SI{3}{\kilo \hertz}. Experimental results in static and dynamic scenarios are presented to demonstrate the performance of the proposed approach in terms of computational speed and absolute accuracy, using the OptiTrack system as the basis for measurement.
Bio-inspired Polarization Event Camera
Dec 02, 2021
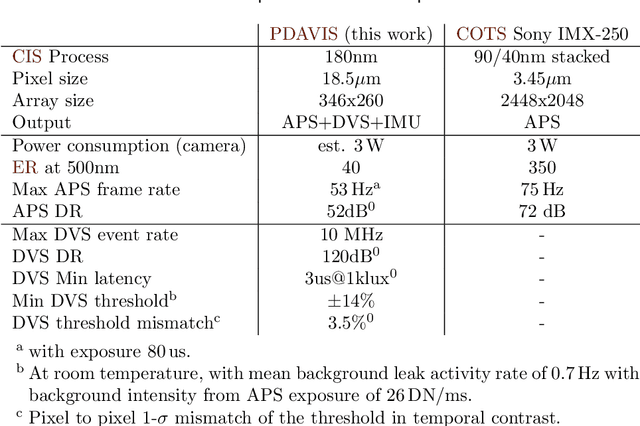
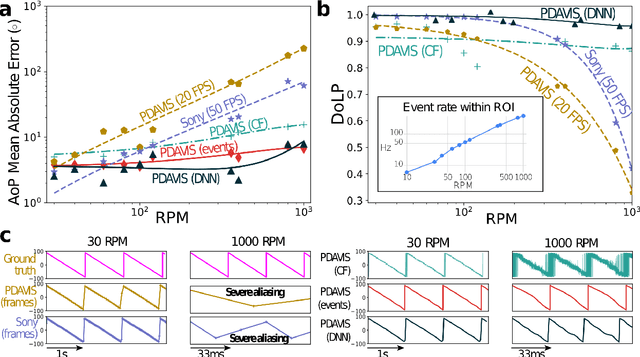

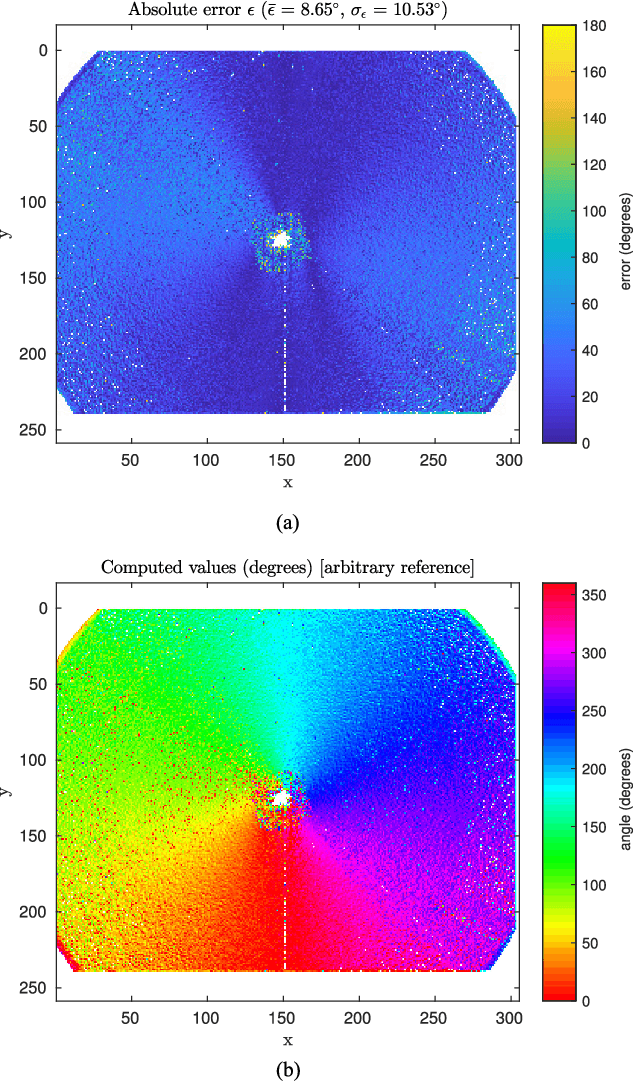
The stomatopod (mantis shrimp) visual system has recently provided a blueprint for the design of paradigm-shifting polarization and multispectral imaging sensors, enabling solutions to challenging medical and remote sensing problems. However, these bioinspired sensors lack the high dynamic range (HDR) and asynchronous polarization vision capabilities of the stomatopod visual system, limiting temporal resolution to \~12 ms and dynamic range to \~ 72 dB. Here we present a novel stomatopod-inspired polarization camera which mimics the sustained and transient biological visual pathways to save power and sample data beyond the maximum Nyquist frame rate. This bio-inspired sensor simultaneously captures both synchronous intensity frames and asynchronous polarization brightness change information with sub-millisecond latencies over a million-fold range of illumination. Our PDAVIS camera is comprised of 346x260 pixels, organized in 2-by-2 macropixels, which filter the incoming light with four linear polarization filters offset by 45 degrees. Polarization information is reconstructed using both low cost and latency event-based algorithms and more accurate but slower deep neural networks. Our sensor is used to image HDR polarization scenes which vary at high speeds and to observe dynamical properties of single collagen fibers in bovine tendon under rapid cyclical loads
Event-Based high-speed low-latency fiducial marker tracking
Oct 12, 2021
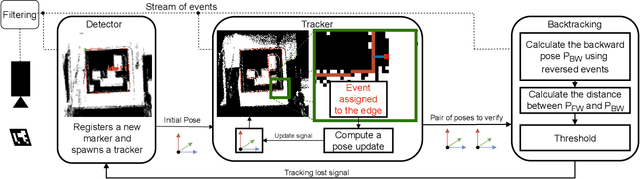
Motion and dynamic environments, especially under challenging lighting conditions, are still an open issue for robust robotic applications. In this paper, we propose an end-to-end pipeline for real-time, low latency, 6 degrees-of-freedom pose estimation of fiducial markers. Instead of achieving a pose estimation through a conventional frame-based approach, we employ the high-speed abilities of event-based sensors to directly refine the spatial transformation, using consecutive events. Furthermore, we introduce a novel two-way verification process for detecting tracking errors by backtracking the estimated pose, allowing us to evaluate the quality of our tracking. This approach allows us to achieve pose estimation at a rate up to 156~kHz, while only relying on CPU resources. The average end-to-end latency of our method is 3~ms. Experimental results demonstrate outstanding potential for robotic tasks, such as visual servoing in fast action-perception loops.
Online Detection of Vibration Anomalies Using Balanced Spiking Neural Networks
Jun 01, 2021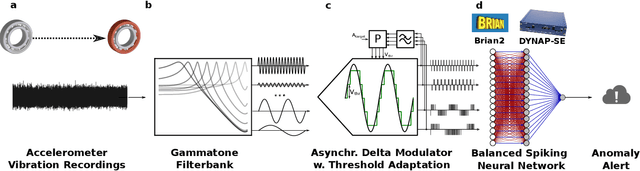
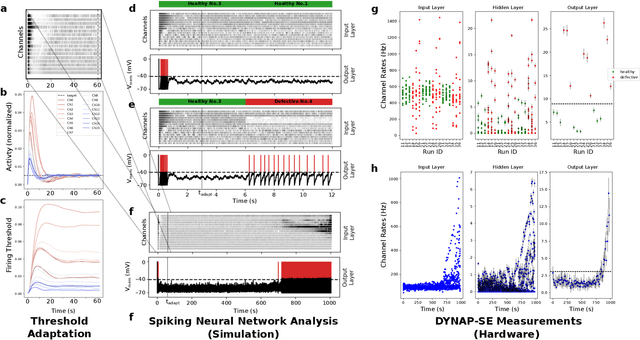
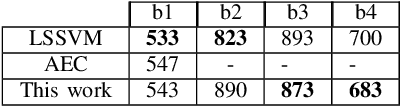
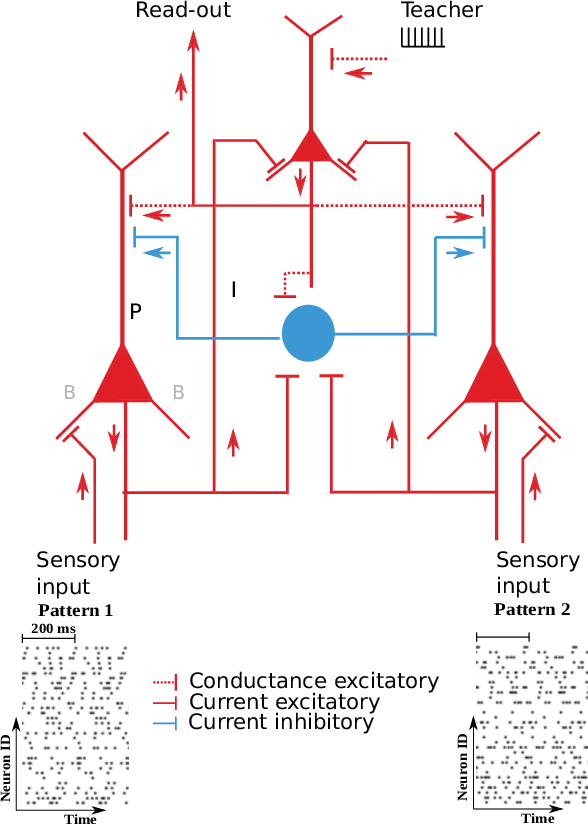
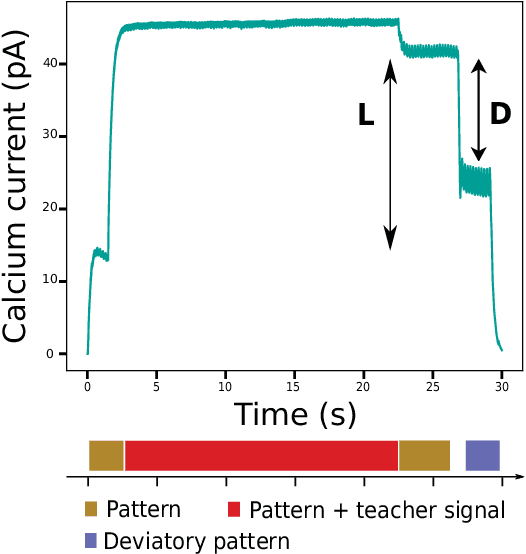
Vibration patterns yield valuable information about the health state of a running machine, which is commonly exploited in predictive maintenance tasks for large industrial systems. However, the overhead, in terms of size, complexity and power budget, required by classical methods to exploit this information is often prohibitive for smaller-scale applications such as autonomous cars, drones or robotics. Here we propose a neuromorphic approach to perform vibration analysis using spiking neural networks that can be applied to a wide range of scenarios. We present a spike-based end-to-end pipeline able to detect system anomalies from vibration data, using building blocks that are compatible with analog-digital neuromorphic circuits. This pipeline operates in an online unsupervised fashion, and relies on a cochlea model, on feedback adaptation and on a balanced spiking neural network. We show that the proposed method achieves state-of-the-art performance or better against two publicly available data sets. Further, we demonstrate a working proof-of-concept implemented on an asynchronous neuromorphic processor device. This work represents a significant step towards the design and implementation of autonomous low-power edge-computing devices for online vibration monitoring.
An error-propagation spiking neural network compatible with neuromorphic processors
Apr 12, 2021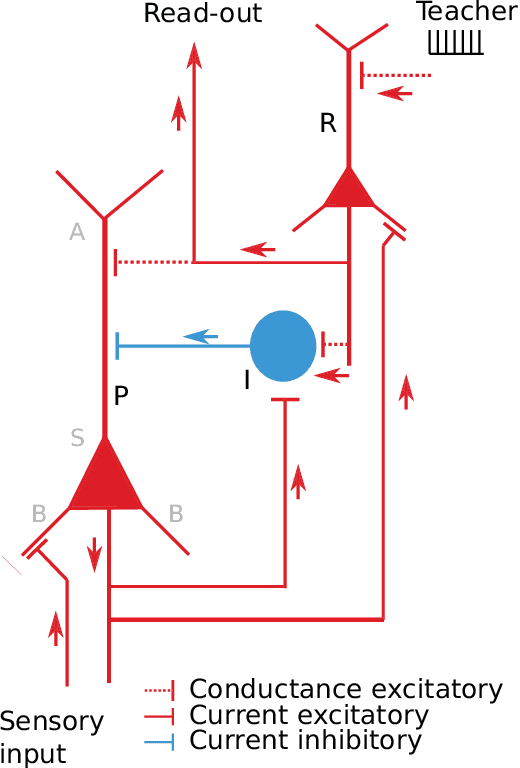
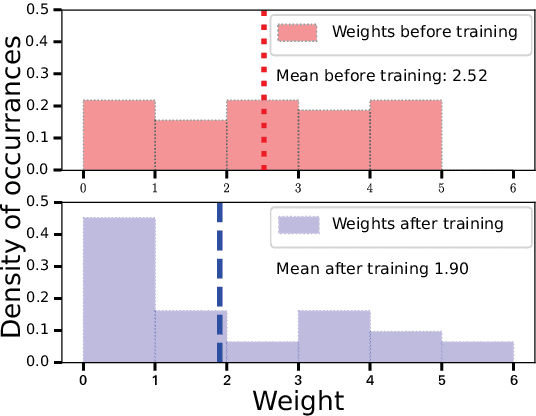
Spiking neural networks have shown great promise for the design of low-power sensory-processing and edge-computing hardware platforms. However, implementing on-chip learning algorithms on such architectures is still an open challenge, especially for multi-layer networks that rely on the back-propagation algorithm. In this paper, we present a spike-based learning method that approximates back-propagation using local weight update mechanisms and which is compatible with mixed-signal analog/digital neuromorphic circuits. We introduce a network architecture that enables synaptic weight update mechanisms to back-propagate error signals across layers and present a network that can be trained to distinguish between two spike-based patterns that have identical mean firing rates, but different spike-timings. This work represents a first step towards the design of ultra-low power mixed-signal neuromorphic processing systems with on-chip learning circuits that can be trained to recognize different spatio-temporal patterns of spiking activity (e.g. produced by event-based vision or auditory sensors).
A Sparse Coding Multi-Scale Precise-Timing Machine Learning Algorithm for Neuromorphic Event-Based Sensors
Apr 24, 2018This paper introduces an unsupervised compact architecture that can extract features and classify the contents of dynamic scenes from the temporal output of a neuromorphic asynchronous event-based camera. Event-based cameras are clock-less sensors where each pixel asynchronously reports intensity changes encoded in time at the microsecond precision. While this technology is gaining more attention, there is still a lack of methodology and understanding of their temporal properties. This paper introduces an unsupervised time-oriented event-based machine learning algorithm building on the concept of hierarchy of temporal descriptors called time surfaces. In this work we show that the use of sparse coding allows for a very compact yet efficient time-based machine learning that lowers both the computational cost and memory need. We show that we can represent visual scene temporal dynamics with a finite set of elementary time surfaces while providing similar recognition rates as an uncompressed version by storing the most representative time surfaces using clustering techniques. Experiments will illustrate the main optimizations and trade-offs to consider when implementing the method for online continuous vs. offline learning. We report results on the same previously published 36 class character recognition task and a 4 class canonical dynamic card pip task, achieving 100% accuracy on each.
Spiking Optical Flow for Event-based Sensors Using IBM's TrueNorth Neurosynaptic System
Oct 26, 2017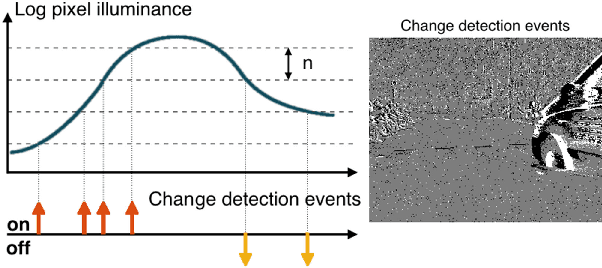
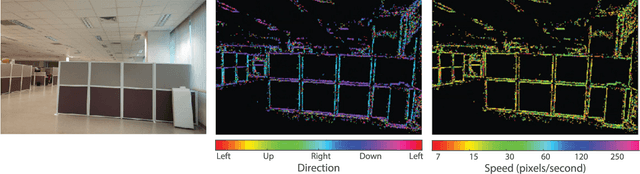
This paper describes a fully spike-based neural network for optical flow estimation from Dynamic Vision Sensor data. A low power embedded implementation of the method which combines the Asynchronous Time-based Image Sensor with IBM's TrueNorth Neurosynaptic System is presented. The sensor generates spikes with sub-millisecond resolution in response to scene illumination changes. These spike are processed by a spiking neural network running on TrueNorth with a 1 millisecond resolution to accurately determine the order and time difference of spikes from neighboring pixels, and therefore infer the velocity. The spiking neural network is a variant of the Barlow Levick method for optical flow estimation. The system is evaluated on two recordings for which ground truth motion is available, and achieves an Average Endpoint Error of 11% at an estimated power budget of under 80mW for the sensor and computation.