 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOsteoFlow: Lyapunov-Guided Flow Distillation for Predicting Bone Remodeling after Mandibular Reconstruction
Mar 23, 2026Predicting long-term bone remodeling after mandibular reconstruction would be of great clinical benefit, yet standard generative models struggle to maintain trajectory-level consistency and anatomical fidelity over long horizons. We introduce OsteoFlow, a flow-based framework predicting Year-1 post-operative CT scans from Day-5 scans. Our core contribution is Lyapunov-guided trajectory distillation: Unlike one-step distillation, our method distills a continuous trajectory over transport time from a registration-derived stationary velocity field teacher. Combined with a resection-aware image loss, this enforces geometric correspondence without sacrificing generative capacity. Evaluated on 344 paired regions of interest, OsteoFlow significantly outperforms state of-the-art baselines, reducing mean absolute error in the surgical resection zone by ~20%. This highlights the promise of trajectory distillation for long-term prediction. Code is available on GitHub: OsteoFlow.
SurgCalib: Gaussian Splatting-Based Hand-Eye Calibration for Robot-Assisted Minimally Invasive Surgery
Mar 09, 2026We present a Gaussian Splatting-based framework for hand-eye calibration of the da Vinci surgical robot. In a vision-guided robotic system, accurate estimation of the rigid transformation between the robot base and the camera frame is essential for reliable closed-loop control. For cable-driven surgical robots, this task faces unique challenges. The encoders of surgical instruments often produce inaccurate proprioceptive measurements due to cable stretch and backlash. Conventional hand-eye calibration approaches typically rely on known fiducial patterns and solve the AX = XB formulation. While effective, introducing additional markers into the operating room (OR) environment can violate sterility protocols and disrupt surgical workflows. In this study, we propose SurgCalib, an automatic, markerless framework that has the potential to be used in the OR. SurgCalib first initializes the pose of the surgical instrument using raw kinematic measurements and subsequently refines this pose through a two-phase optimization procedure under the RCM constraint within a Gaussian Splatting-based differentiable rendering pipeline. We evaluate the proposed method on the public dVRK benchmark, SurgPose. The results demonstrate average 2D tool-tip reprojection errors of 12.24 px (2.06 mm) and 11.33 px (1.9 mm), and 3D tool-tip Euclidean distance errors of 5.98 mm and 4.75 mm, for the left and right instruments, respectively.
Semantic-ICP: Iterative Closest Point for Non-rigid Multi-Organ Point Cloud Registration
Mar 02, 2025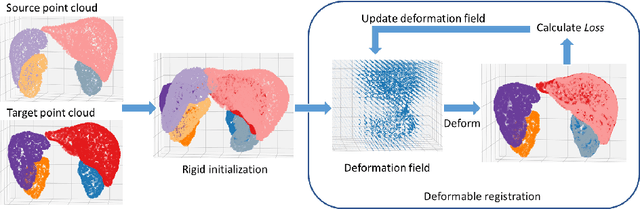
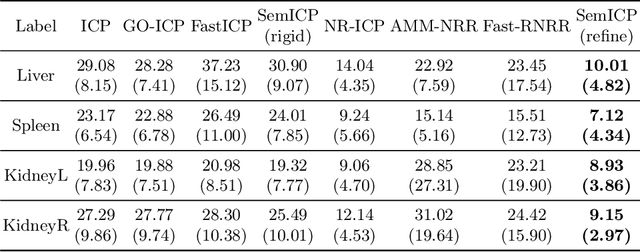
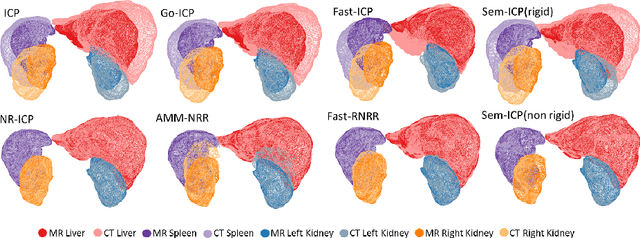
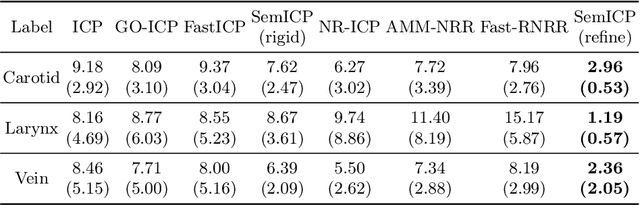
Point cloud registration is important in computer-aided interventions (CAI). While learning-based point cloud registration methods have been developed, their clinical application is hampered by issues of generalizability and explainability. Therefore, classical point cloud registration methods, such as Iterative Closest Point (ICP), are still widely applied in CAI. ICP methods fail to consider that: (1) the points have well-defined semantic meaning, in that each point can be related to a specific anatomical label; (2) the deformation needs to follow biomechanical energy constraints. In this paper, we present a novel semantic ICP (sem-ICP) method that handles multiple point labels and uses linear elastic energy regularization. We use semantic labels to improve the robustness of the closest point matching and propose a new point cloud deformation representation to apply explicit biomechanical energy regularization. Our experiments on the Learn2reg abdominal MR-CT registration dataset and a trans-oral robotic surgery ultrasound-CT registration dataset show that our method improves the Hausdorff distance compared with other state-of-the-art ICP-based registration methods. We also perform a sensitivity study to show that our rigid initialization achieves better convergence with different initializations and visible ratios.
Image Retrieval with Intra-Sweep Representation Learning for Neck Ultrasound Scanning Guidance
Dec 10, 2024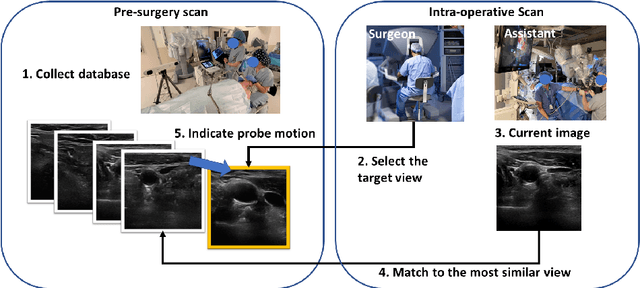

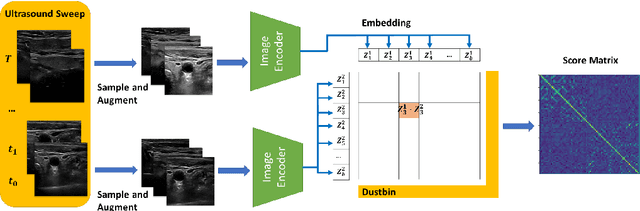
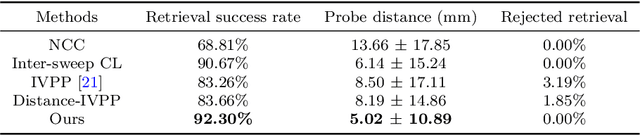
Purpose: Intraoperative ultrasound (US) can enhance real-time visualization in transoral robotic surgery. The surgeon creates a mental map with a pre-operative scan. Then, a surgical assistant performs freehand US scanning during the surgery while the surgeon operates at the remote surgical console. Communicating the target scanning plane in the surgeon's mental map is difficult. Automatic image retrieval can help match intraoperative images to preoperative scans, guiding the assistant to adjust the US probe toward the target plane. Methods: We propose a self-supervised contrastive learning approach to match intraoperative US views to a preoperative image database. We introduce a novel contrastive learning strategy that leverages intra-sweep similarity and US probe location to improve feature encoding. Additionally, our model incorporates a flexible threshold to reject unsatisfactory matches. Results: Our method achieves 92.30% retrieval accuracy on simulated data and outperforms state-of-the-art temporal-based contrastive learning approaches. Our ablation study demonstrates that using probe location in the optimization goal improves image representation, suggesting that semantic information can be extracted from probe location. We also present our approach on real patient data to show the feasibility of the proposed US probe localization system despite tissue deformation from tongue retraction. Conclusion: Our contrastive learning method, which utilizes intra-sweep similarity and US probe location, enhances US image representation learning. We also demonstrate the feasibility of using our image retrieval method to provide neck US localization on real patient US after tongue retraction.
PIPsUS: Self-Supervised Dense Point Tracking in Ultrasound
Mar 08, 2024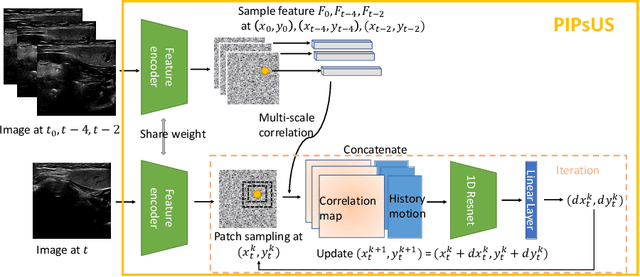
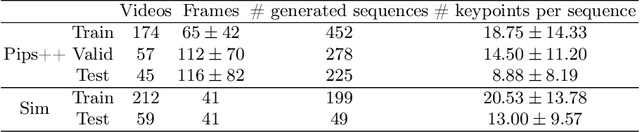
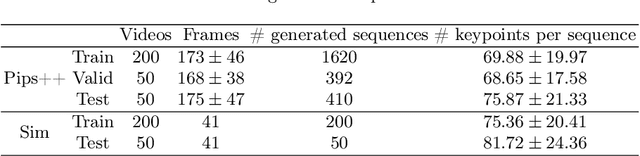
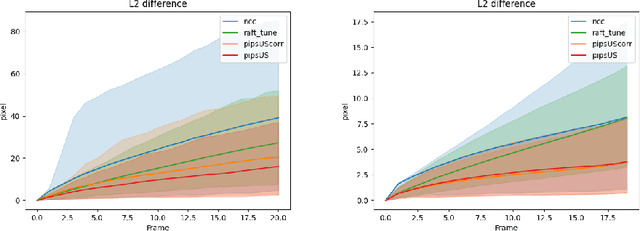
Finding point-level correspondences is a fundamental problem in ultrasound (US), since it can enable US landmark tracking for intraoperative image guidance in different surgeries, including head and neck. Most existing US tracking methods, e.g., those based on optical flow or feature matching, were initially designed for RGB images before being applied to US. Therefore domain shift can impact their performance. Training could be supervised by ground-truth correspondences, but these are expensive to acquire in US. To solve these problems, we propose a self-supervised pixel-level tracking model called PIPsUS. Our model can track an arbitrary number of points in one forward pass and exploits temporal information by considering multiple, instead of just consecutive, frames. We developed a new self-supervised training strategy that utilizes a long-term point-tracking model trained for RGB images as a teacher to guide the model to learn realistic motions and use data augmentation to enforce tracking from US appearance. We evaluate our method on neck and oral US and echocardiography, showing higher point tracking accuracy when compared with fast normalized cross-correlation and tuned optical flow. Code will be available once the paper is accepted.
Transcervical Ultrasound Image Guidance System for Transoral Robotic Surgery
Nov 29, 2022Purpose: Trans-oral robotic surgery (TORS) using the da Vinci surgical robot is a new minimally-invasive surgery method to treat oropharyngeal tumors, but it is a challenging operation. Augmented reality (AR) based on intra-operative ultrasound (US) has the potential to enhance the visualization of the anatomy and cancerous tumors to provide additional tools for decision-making in surgery. Methods: We propose and carry out preliminary evaluations of a US-guided AR system for TORS, with the transducer placed on the neck for a transcervical view. Firstly, we perform a novel MRI-transcervical 3D US registration study. Secondly, we develop a US-robot calibration method with an optical tracker and an AR system to display the anatomy mesh model in the real-time endoscope images inside the surgeon console. Results: Our AR system reaches a mean projection error of 26.81 and 27.85 pixels for the projection from the US to stereo cameras in a water bath experiment. The average target registration error for MRI to 3D US is 8.90 mm for the 3D US transducer and 5.85 mm for freehand 3D US, and the average distance between the vessel centerlines is 2.32 mm. Conclusion: We demonstrate the first proof-of-concept transcervical US-guided AR system for TORS and the feasibility of trans-cervical 3D US-MRI registration. Our results show that trans-cervical 3D US is a promising technique for TORS image guidance.
Variational Shape Completion for Virtual Planning of Jaw Reconstructive Surgery
Jul 15, 2019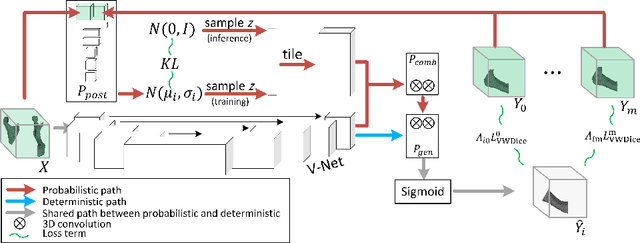
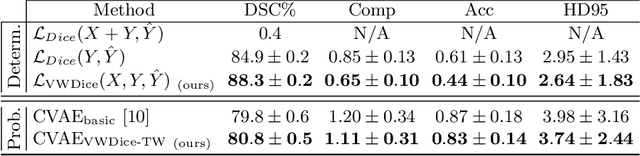

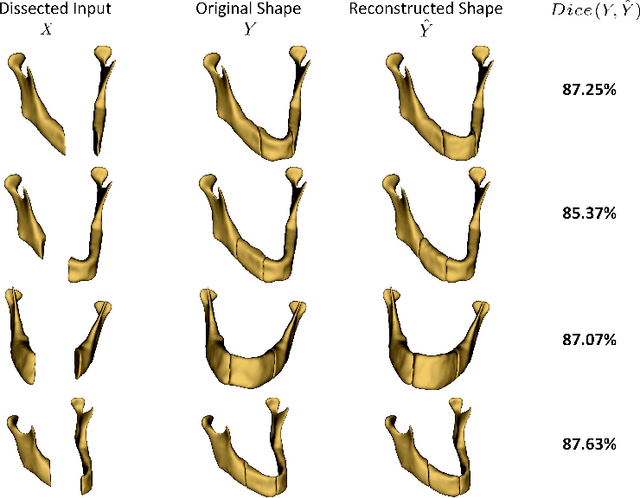
The premorbid geometry of the mandible is of significant relevance in jaw reconstructive surgeries and occasionally unknown to the surgical team. In this paper, an optimization framework is introduced to train deep models for completion (reconstruction) of the missing segments of the bone based on the remaining healthy structure. To leverage the contextual information of the surroundings of the dissected region, the voxel-weighted Dice loss is introduced. To address the non-deterministic nature of the shape completion problem, we leverage a weighted multi-target probabilistic solution which is an extension to the conditional variational autoencoder (CVAE). This approach considers multiple targets as acceptable reconstructions, each weighted according to their conformity with the original shape. We quantify the performance gain of the proposed method against similar algorithms, including CVAE, where we report statistically significant improvements in both deterministic and probabilistic paradigms. The probabilistic model is also evaluated on its ability to generate anatomically relevant variations for the missing bone. As a unique aspect of this work, the model is tested on real surgical cases where the clinical relevancy of its reconstructions and their compliance with surgeon's virtual plan are demonstrated as necessary steps towards clinical adoption.