 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImage Retrieval with Intra-Sweep Representation Learning for Neck Ultrasound Scanning Guidance
Paper and Code
Dec 10, 2024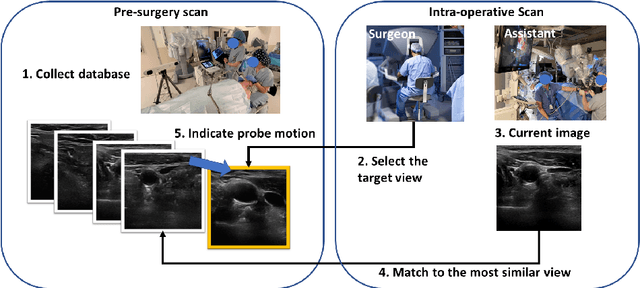

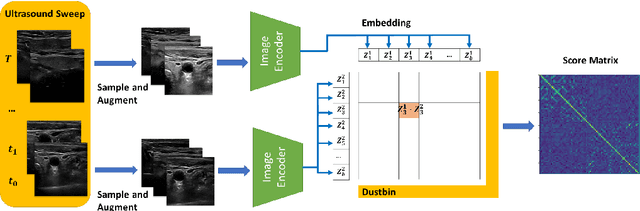
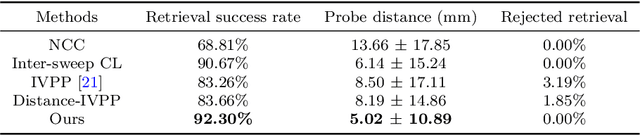
Purpose: Intraoperative ultrasound (US) can enhance real-time visualization in transoral robotic surgery. The surgeon creates a mental map with a pre-operative scan. Then, a surgical assistant performs freehand US scanning during the surgery while the surgeon operates at the remote surgical console. Communicating the target scanning plane in the surgeon's mental map is difficult. Automatic image retrieval can help match intraoperative images to preoperative scans, guiding the assistant to adjust the US probe toward the target plane. Methods: We propose a self-supervised contrastive learning approach to match intraoperative US views to a preoperative image database. We introduce a novel contrastive learning strategy that leverages intra-sweep similarity and US probe location to improve feature encoding. Additionally, our model incorporates a flexible threshold to reject unsatisfactory matches. Results: Our method achieves 92.30% retrieval accuracy on simulated data and outperforms state-of-the-art temporal-based contrastive learning approaches. Our ablation study demonstrates that using probe location in the optimization goal improves image representation, suggesting that semantic information can be extracted from probe location. We also present our approach on real patient data to show the feasibility of the proposed US probe localization system despite tissue deformation from tongue retraction. Conclusion: Our contrastive learning method, which utilizes intra-sweep similarity and US probe location, enhances US image representation learning. We also demonstrate the feasibility of using our image retrieval method to provide neck US localization on real patient US after tongue retraction.