 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToolTipNet: A Segmentation-Driven Deep Learning Baseline for Surgical Instrument Tip Detection
Apr 13, 2025In robot-assisted laparoscopic radical prostatectomy (RALP), the location of the instrument tip is important to register the ultrasound frame with the laparoscopic camera frame. A long-standing limitation is that the instrument tip position obtained from the da Vinci API is inaccurate and requires hand-eye calibration. Thus, directly computing the position of the tool tip in the camera frame using the vision-based method becomes an attractive solution. Besides, surgical instrument tip detection is the key component of other tasks, like surgical skill assessment and surgery automation. However, this task is challenging due to the small size of the tool tip and the articulation of the surgical instrument. Surgical instrument segmentation becomes relatively easy due to the emergence of the Segmentation Foundation Model, i.e., Segment Anything. Based on this advancement, we explore the deep learning-based surgical instrument tip detection approach that takes the part-level instrument segmentation mask as input. Comparison experiments with a hand-crafted image-processing approach demonstrate the superiority of the proposed method on simulated and real datasets.
PIPsUS: Self-Supervised Dense Point Tracking in Ultrasound
Mar 08, 2024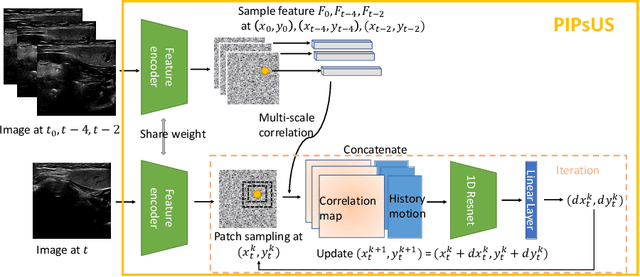
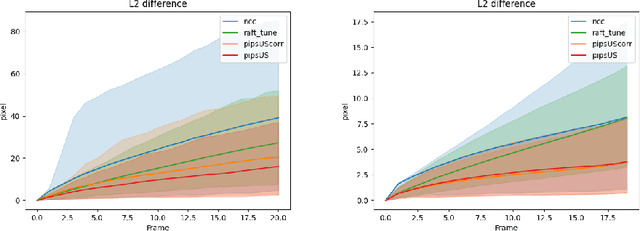
Finding point-level correspondences is a fundamental problem in ultrasound (US), since it can enable US landmark tracking for intraoperative image guidance in different surgeries, including head and neck. Most existing US tracking methods, e.g., those based on optical flow or feature matching, were initially designed for RGB images before being applied to US. Therefore domain shift can impact their performance. Training could be supervised by ground-truth correspondences, but these are expensive to acquire in US. To solve these problems, we propose a self-supervised pixel-level tracking model called PIPsUS. Our model can track an arbitrary number of points in one forward pass and exploits temporal information by considering multiple, instead of just consecutive, frames. We developed a new self-supervised training strategy that utilizes a long-term point-tracking model trained for RGB images as a teacher to guide the model to learn realistic motions and use data augmentation to enforce tracking from US appearance. We evaluate our method on neck and oral US and echocardiography, showing higher point tracking accuracy when compared with fast normalized cross-correlation and tuned optical flow. Code will be available once the paper is accepted.