 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFusion Flow-enhanced Graph Pooling Residual Networks for Unmanned Aerial Vehicles Surveillance in Day and Night Dual Visions
Jul 17, 2024



Recognizing unauthorized Unmanned Aerial Vehicles (UAVs) within designated no-fly zones throughout the day and night is of paramount importance, where the unauthorized UAVs pose a substantial threat to both civil and military aviation safety. However, recognizing UAVs day and night with dual-vision cameras is nontrivial, since red-green-blue (RGB) images suffer from a low detection rate under an insufficient light condition, such as on cloudy or stormy days, while black-and-white infrared (IR) images struggle to capture UAVs that overlap with the background at night. In this paper, we propose a new optical flow-assisted graph-pooling residual network (OF-GPRN), which significantly enhances the UAV detection rate in day and night dual visions. The proposed OF-GPRN develops a new optical fusion to remove superfluous backgrounds, which improves RGB/IR imaging clarity. Furthermore, OF-GPRN extends optical fusion by incorporating a graph residual split attention network and a feature pyramid, which refines the perception of UAVs, leading to a higher success rate in UAV detection. A comprehensive performance evaluation is conducted using a benchmark UAV catch dataset. The results indicate that the proposed OF-GPRN elevates the UAV mean average precision (mAP) detection rate to 87.8%, marking a 17.9% advancement compared to the residual graph neural network (ResGCN)-based approach.
A Novel Defense Against Poisoning Attacks on Federated Learning: LayerCAM Augmented with Autoencoder
Jun 02, 2024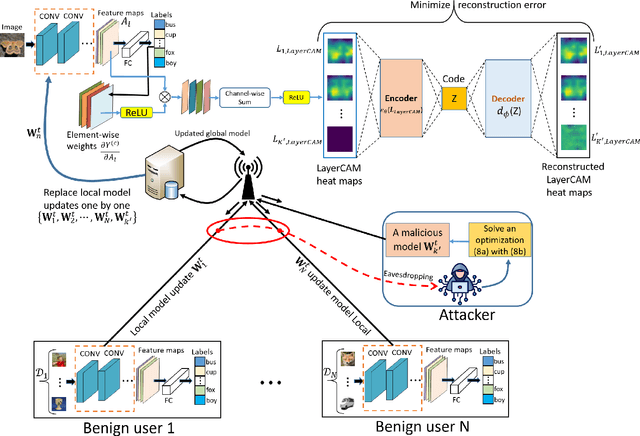

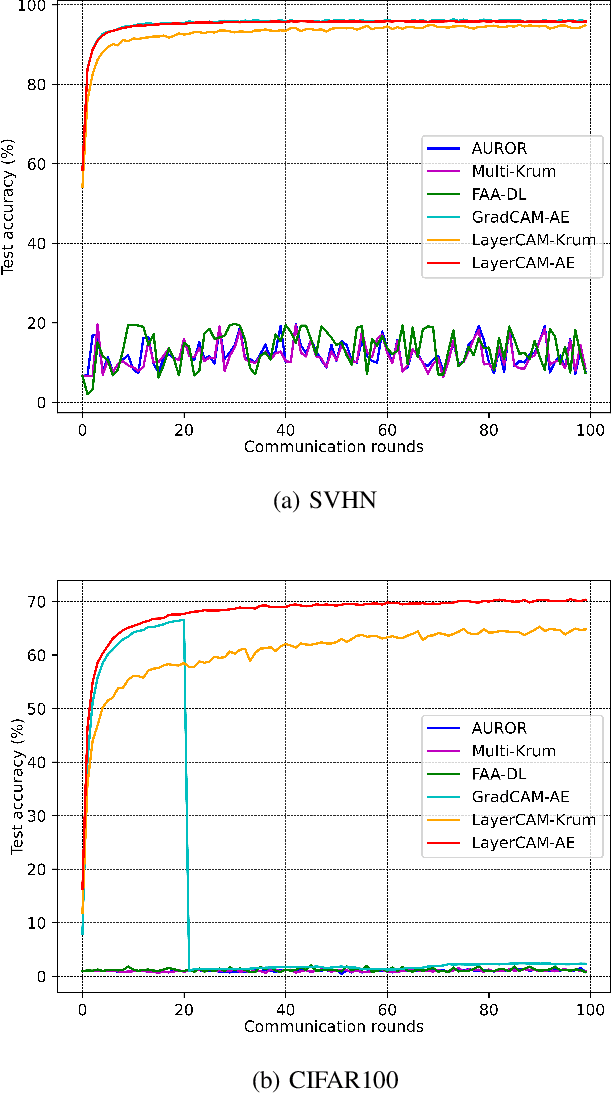
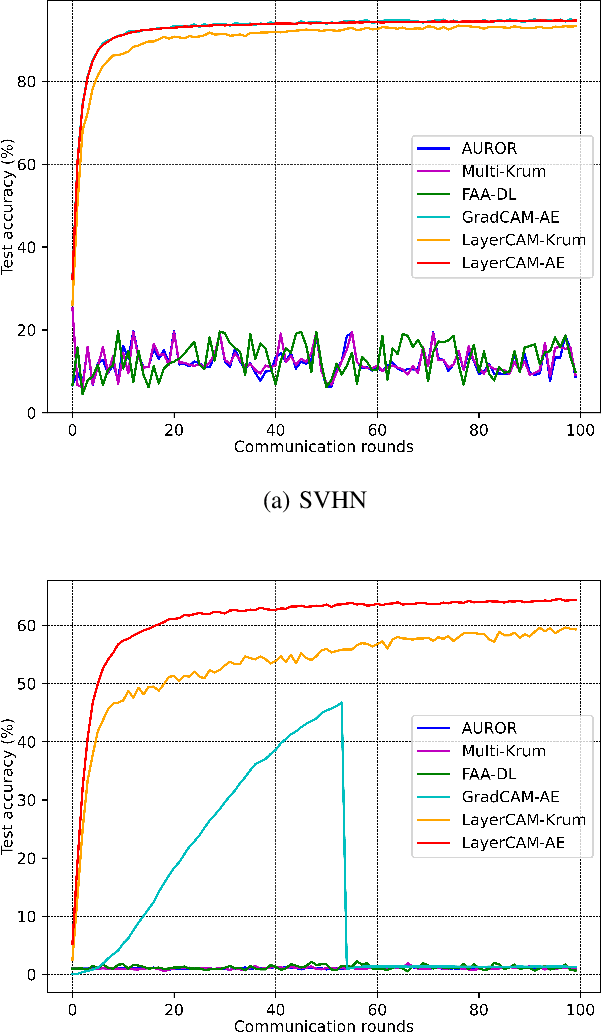
Recent attacks on federated learning (FL) can introduce malicious model updates that circumvent widely adopted Euclidean distance-based detection methods. This paper proposes a novel defense strategy, referred to as LayerCAM-AE, designed to counteract model poisoning in federated learning. The LayerCAM-AE puts forth a new Layer Class Activation Mapping (LayerCAM) integrated with an autoencoder (AE), significantly enhancing detection capabilities. Specifically, LayerCAM-AE generates a heat map for each local model update, which is then transformed into a more compact visual format. The autoencoder is designed to process the LayerCAM heat maps from the local model updates, improving their distinctiveness and thereby increasing the accuracy in spotting anomalous maps and malicious local models. To address the risk of misclassifications with LayerCAM-AE, a voting algorithm is developed, where a local model update is flagged as malicious if its heat maps are consistently suspicious over several rounds of communication. Extensive tests of LayerCAM-AE on the SVHN and CIFAR-100 datasets are performed under both Independent and Identically Distributed (IID) and non-IID settings in comparison with existing ResNet-50 and REGNETY-800MF defense models. Experimental results show that LayerCAM-AE increases detection rates (Recall: 1.0, Precision: 1.0, FPR: 0.0, Accuracy: 1.0, F1 score: 1.0, AUC: 1.0) and test accuracy in FL, surpassing the performance of both the ResNet-50 and REGNETY-800MF. Our code is available at: https://github.com/jjzgeeks/LayerCAM-AE
Exploring Deep Reinforcement Learning-Assisted Federated Learning for Online Resource Allocation in EdgeIoT
Feb 15, 2022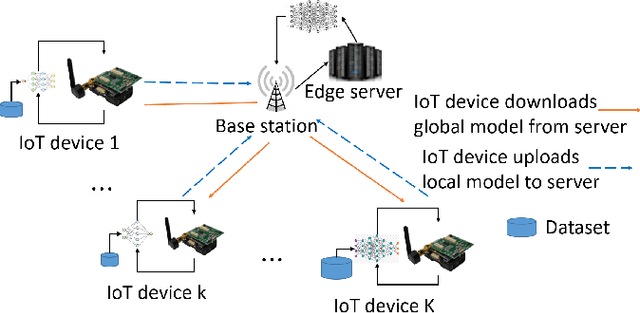
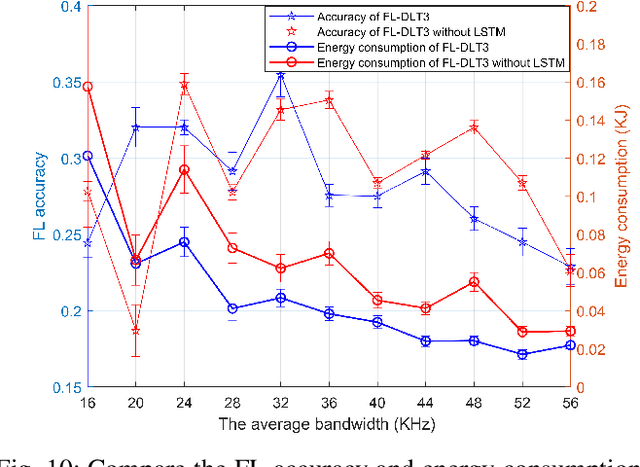
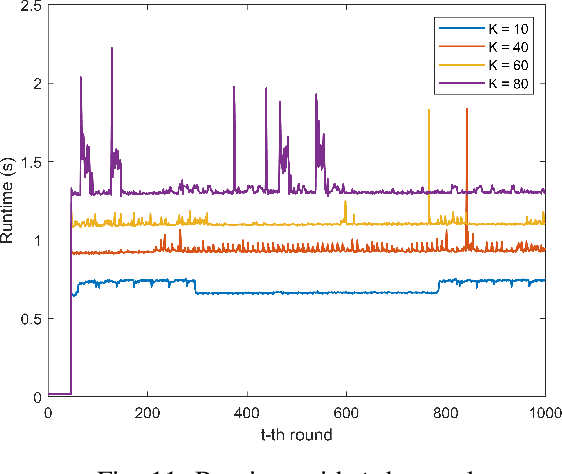
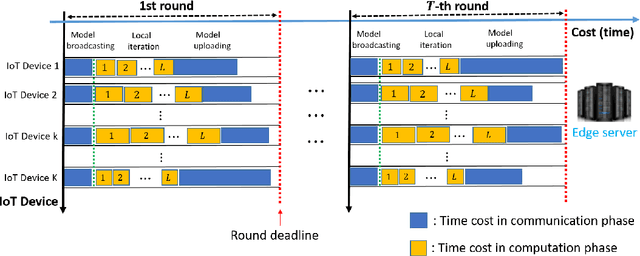
Federated learning (FL) has been increasingly considered to preserve data training privacy from eavesdropping attacks in mobile edge computing-based Internet of Thing (EdgeIoT). On the one hand, the learning accuracy of FL can be improved by selecting the IoT devices with large datasets for training, which gives rise to a higher energy consumption. On the other hand, the energy consumption can be reduced by selecting the IoT devices with small datasets for FL, resulting in a falling learning accuracy. In this paper, we formulate a new resource allocation problem for EdgeIoT to balance the learning accuracy of FL and the energy consumption of the IoT device. We propose a new federated learning-enabled twin-delayed deep deterministic policy gradient (FLDLT3) framework to achieve the optimal accuracy and energy balance in a continuous domain. Furthermore, long short term memory (LSTM) is leveraged in FL-DLT3 to predict the time-varying network state while FL-DLT3 is trained to select the IoT devices and allocate the transmit power. Numerical results demonstrate that the proposed FL-DLT3 achieves fast convergence (less than 100 iterations) while the FL accuracy-to-energy consumption ratio is improved by 51.8% compared to existing state-of-the-art benchmark.
On-board Deep Q-Network for UAV-assisted Online Power Transfer and Data Collection
Jun 04, 2019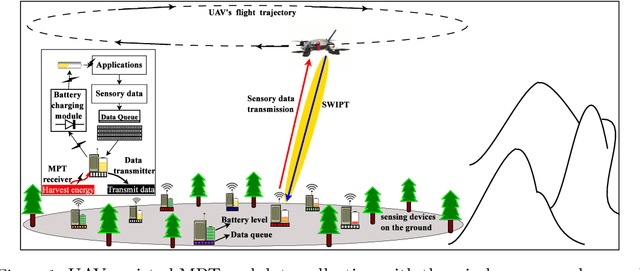
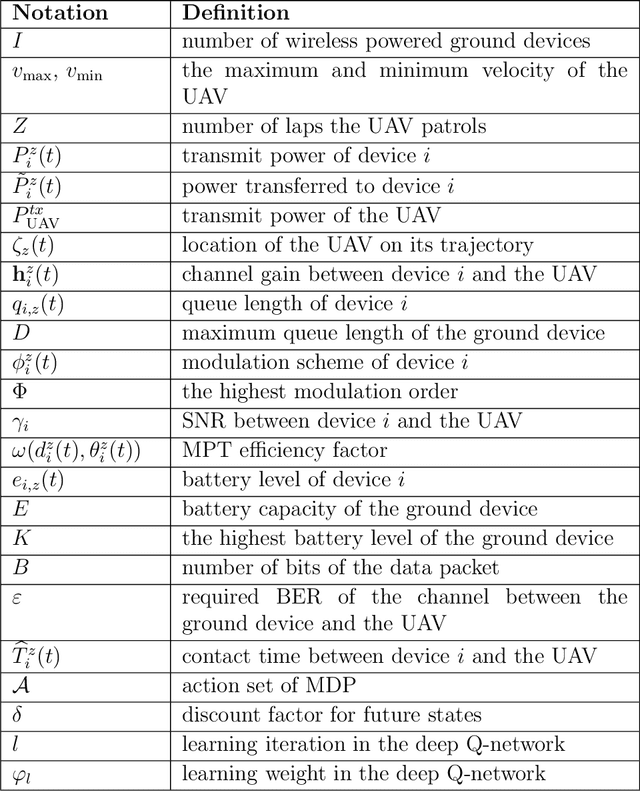
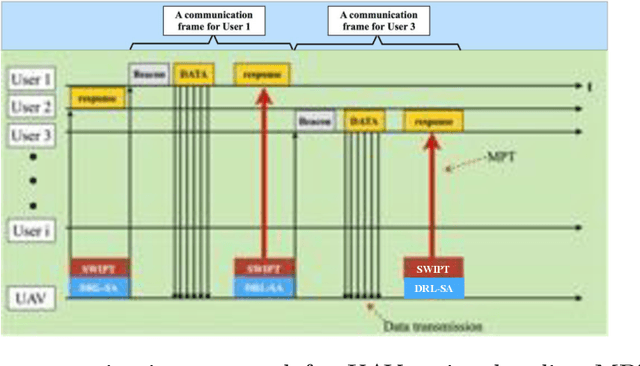
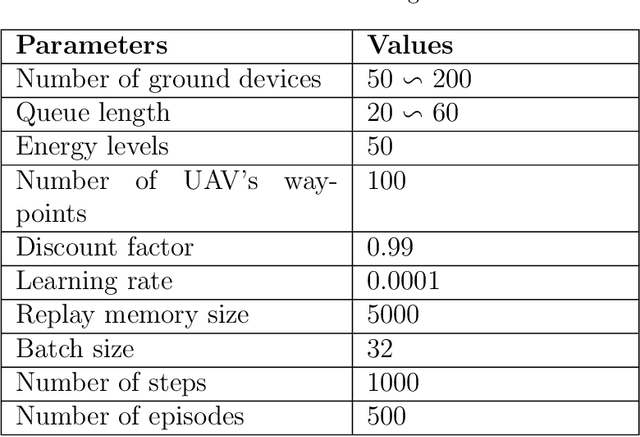
Unmanned Aerial Vehicles (UAVs) with Microwave Power Transfer (MPT) capability provide a practical means to deploy a large number of wireless powered sensing devices into areas with no access to persistent power supplies. The UAV can charge the sensing devices remotely and harvest their data. A key challenge is online MPT and data collection in the presence of on-board control of a UAV (e.g., patrolling velocity) for preventing battery drainage and data queue overflow of the sensing devices, while up-to-date knowledge on battery level and data queue of the devices is not available at the UAV. In this paper, an on-board deep Q-network is developed to minimize the overall data packet loss of the sensing devices, by optimally deciding the device to be charged and interrogated for data collection, and the instantaneous patrolling velocity of the UAV. Specifically, we formulate a Markov Decision Process (MDP) with the states of battery level and data queue length of sensing devices, channel conditions, and waypoints given the trajectory of the UAV; and solve it optimally with Q-learning. Furthermore, we propose the on-board deep Q-network that can enlarge the state space of the MDP, and a deep reinforcement learning based scheduling algorithm that asymptotically derives the optimal solution online, even when the UAV has only outdated knowledge on the MDP states. Numerical results demonstrate that the proposed deep reinforcement learning algorithm reduces the packet loss by at least 69.2%, as compared to existing non-learning greedy algorithms.
Towards a Realistic Simulation Framework for Vehicular Platooning Applications
Apr 05, 2019


Cooperative vehicle platooning applications increasingly demand realistic simulation tools to ease their validation and to bridge the gap between development and real-world deployment. However, their complexity and cost often hinder its validation in the real world. In this paper, we propose a realistic simulation framework for vehicular platoons that integrates Gazebo with OMNeT++ over Robot Operating System (ROS) to support the simulation of realistic scenarios of autonomous vehicular platoons and their cooperative control.
* accepted in 22nd IEEE International Symposium on Real-Time Computing