 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControl of Renewable Energy Communities using AI and Real-World Data
May 22, 2025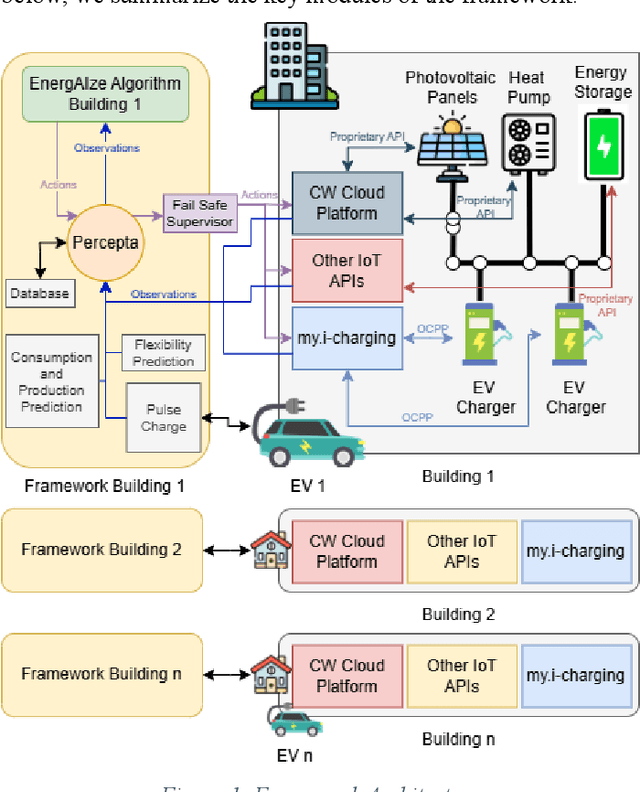
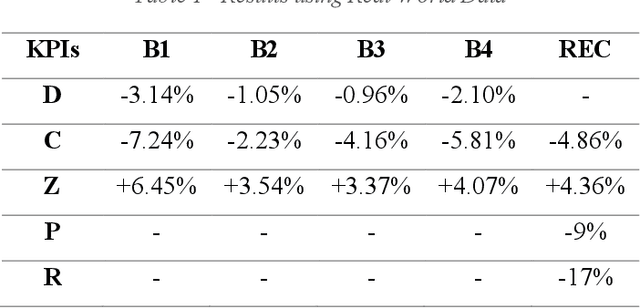
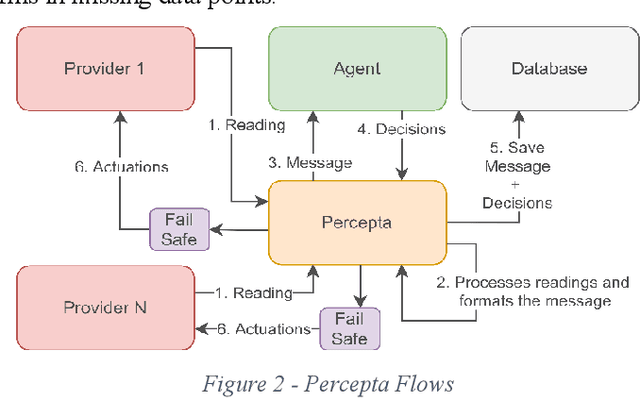
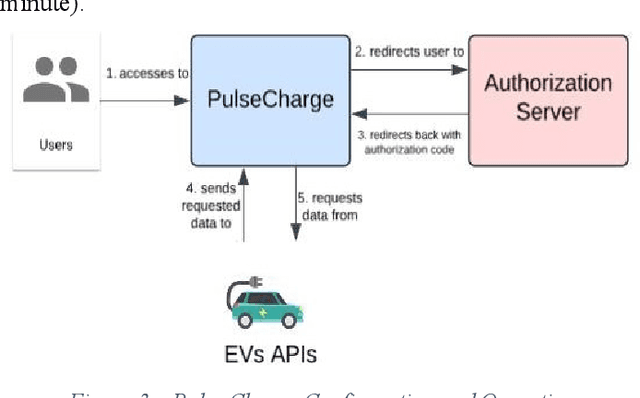
The electrification of transportation and the increased adoption of decentralized renewable energy generation have added complexity to managing Renewable Energy Communities (RECs). Integrating Electric Vehicle (EV) charging with building energy systems like heating, ventilation, air conditioning (HVAC), photovoltaic (PV) generation, and battery storage presents significant opportunities but also practical challenges. Reinforcement learning (RL), particularly MultiAgent Deep Deterministic Policy Gradient (MADDPG) algorithms, have shown promising results in simulation, outperforming heuristic control strategies. However, translating these successes into real-world deployments faces substantial challenges, including incomplete and noisy data, integration of heterogeneous subsystems, synchronization issues, unpredictable occupant behavior, and missing critical EV state-of-charge (SoC) information. This paper introduces a framework designed explicitly to handle these complexities and bridge the simulation to-reality gap. The framework incorporates EnergAIze, a MADDPG-based multi-agent control strategy, and specifically addresses challenges related to real-world data collection, system integration, and user behavior modeling. Preliminary results collected from a real-world operational REC with four residential buildings demonstrate the practical feasibility of our approach, achieving an average 9% reduction in daily peak demand and a 5% decrease in energy costs through optimized load scheduling and EV charging behaviors. These outcomes underscore the framework's effectiveness, advancing the practical deployment of intelligent energy management solutions in RECs.
Evaluating LLaMA 3.2 for Software Vulnerability Detection
Mar 10, 2025



Deep Learning (DL) has emerged as a powerful tool for vulnerability detection, often outperforming traditional solutions. However, developing effective DL models requires large amounts of real-world data, which can be difficult to obtain in sufficient quantities. To address this challenge, DiverseVul dataset has been curated as the largest dataset of vulnerable and non-vulnerable C/C++ functions extracted exclusively from real-world projects. Its goal is to provide high-quality, large-scale samples for training DL models. However, during our study several inconsistencies were identified in the raw dataset while applying pre-processing techniques, highlighting the need for a refined version. In this work, we present a refined version of DiverseVul dataset, which is used to fine-tune a large language model, LLaMA 3.2, for vulnerability detection. Experimental results show that the use of pre-processing techniques led to an improvement in performance, with the model achieving an F1-Score of 66%, a competitive result when compared to our baseline, which achieved a 47% F1-Score in software vulnerability detection.
EnergAIze: Multi Agent Deep Deterministic Policy Gradient for Vehicle to Grid Energy Management
Apr 09, 2024This paper investigates the increasing roles of Renewable Energy Sources (RES) and Electric Vehicles (EVs). While indicating a new era of sustainable energy, these also introduce complex challenges, including the need to balance supply and demand and smooth peak consumptions amidst rising EV adoption rates. Addressing these challenges requires innovative solutions such as Demand Response (DR), energy flexibility management, Renewable Energy Communities (RECs), and more specifically for EVs, Vehicle-to-Grid (V2G). However, existing V2G approaches often fall short in real-world adaptability, global REC optimization with other flexible assets, scalability, and user engagement. To bridge this gap, this paper introduces EnergAIze, a Multi-Agent Reinforcement Learning (MARL) energy management framework, leveraging the Multi-Agent Deep Deterministic Policy Gradient (MADDPG) algorithm. EnergAIze enables user-centric and multi-objective energy management by allowing each prosumer to select from a range of personal management objectives, thus encouraging engagement. Additionally, it architects' data protection and ownership through decentralized computing, where each prosumer can situate an energy management optimization node directly at their own dwelling. The local node not only manages local energy assets but also fosters REC wide optimization. The efficacy of EnergAIze was evaluated through case studies employing the CityLearn simulation framework. These simulations were instrumental in demonstrating EnergAIze's adeptness at implementing V2G technology within a REC and other energy assets. The results show reduction in peak loads, ramping, carbon emissions, and electricity costs at the REC level while optimizing for individual prosumers objectives.
Towards Adaptive RF Fingerprint-based Authentication of IIoT devices
Nov 27, 2023As IoT technologies mature, they are increasingly finding their way into more sensitive domains, such as Medical and Industrial IoT, in which safety and cyber-security are of great importance. While the number of deployed IoT devices continues to increase exponentially, they still present severe cyber-security vulnerabilities. Effective authentication is paramount to support trustworthy IIoT communications, however, current solutions focus on upper-layer identity verification or key-based cryptography which are often inadequate to the heterogeneous IIoT environment. In this work, we present a first step towards achieving powerful and flexible IIoT device authentication, by leveraging AI adaptive Radio Frequency Fingerprinting technique selection and tuning, at the PHY layer for highly accurate device authentication over challenging RF environments.
AuNa: Modularly Integrated Simulation Framework for Cooperative Autonomous Navigation
Jul 12, 2022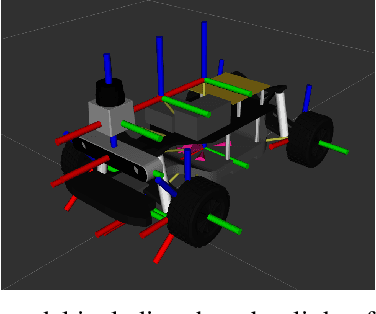


In the near future, the development of autonomous driving will get more complex as the vehicles will not only rely on their own sensors but also communicate with other vehicles and the infrastructure to cooperate and improve the driving experience. Towards this, several research areas, such as robotics, communication, and control, are required to collaborate in order to implement future-ready methods. However, each area focuses on the development of its own components first, while the effects the components may have on the whole system are only considered at a later stage. In this work, we integrate the simulation tools of robotics, communication and control namely ROS2, OMNeT++, and MATLAB to evaluate cooperative driving scenarios. The framework can be utilized to develop the individual components using the designated tools, while the final evaluation can be conducted in a complete scenario, enabling the simulation of advanced multi-robot applications for cooperative driving. Furthermore, it can be used to integrate additional tools, as the integration is done in a modular way. We showcase the framework by demonstrating a platooning scenario under cooperative adaptive cruise control (CACC) and the ETSI ITS-G5 communication architecture. Additionally, we compare the differences of the controller performance between the theoretical analysis and practical case study.
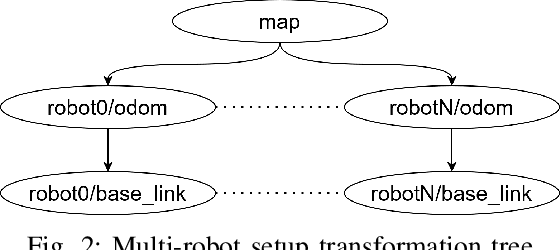
Towards a Realistic Simulation Framework for Vehicular Platooning Applications
Apr 05, 2019


Cooperative vehicle platooning applications increasingly demand realistic simulation tools to ease their validation and to bridge the gap between development and real-world deployment. However, their complexity and cost often hinder its validation in the real world. In this paper, we propose a realistic simulation framework for vehicular platoons that integrates Gazebo with OMNeT++ over Robot Operating System (ROS) to support the simulation of realistic scenarios of autonomous vehicular platoons and their cooperative control.
* accepted in 22nd IEEE International Symposium on Real-Time Computing