 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFusion Flow-enhanced Graph Pooling Residual Networks for Unmanned Aerial Vehicles Surveillance in Day and Night Dual Visions
Jul 17, 2024



Recognizing unauthorized Unmanned Aerial Vehicles (UAVs) within designated no-fly zones throughout the day and night is of paramount importance, where the unauthorized UAVs pose a substantial threat to both civil and military aviation safety. However, recognizing UAVs day and night with dual-vision cameras is nontrivial, since red-green-blue (RGB) images suffer from a low detection rate under an insufficient light condition, such as on cloudy or stormy days, while black-and-white infrared (IR) images struggle to capture UAVs that overlap with the background at night. In this paper, we propose a new optical flow-assisted graph-pooling residual network (OF-GPRN), which significantly enhances the UAV detection rate in day and night dual visions. The proposed OF-GPRN develops a new optical fusion to remove superfluous backgrounds, which improves RGB/IR imaging clarity. Furthermore, OF-GPRN extends optical fusion by incorporating a graph residual split attention network and a feature pyramid, which refines the perception of UAVs, leading to a higher success rate in UAV detection. A comprehensive performance evaluation is conducted using a benchmark UAV catch dataset. The results indicate that the proposed OF-GPRN elevates the UAV mean average precision (mAP) detection rate to 87.8%, marking a 17.9% advancement compared to the residual graph neural network (ResGCN)-based approach.
DriftNet: Aggressive Driving Behavior Classification using 3D EfficientNet Architecture
Apr 18, 2020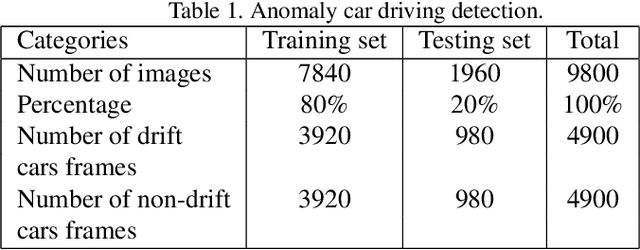
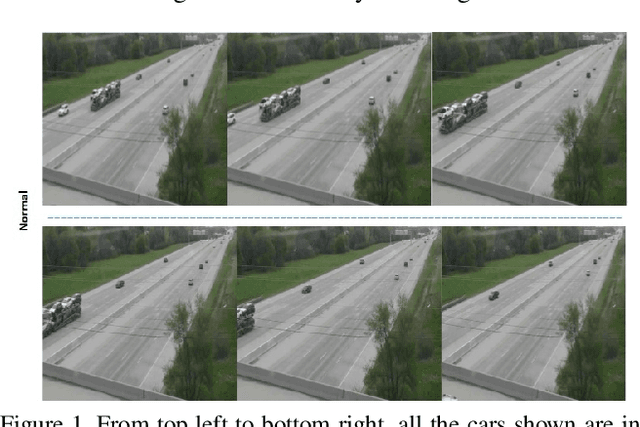
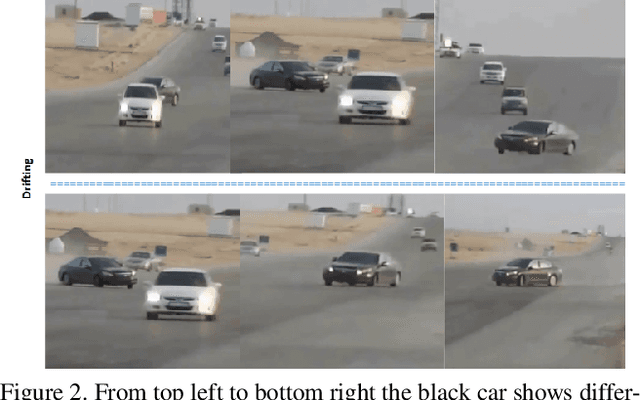
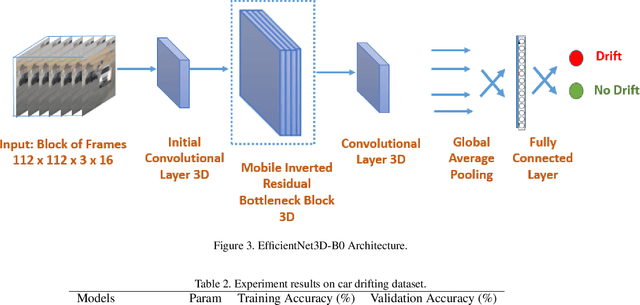
Aggressive driving (i.e., car drifting) is a dangerous behavior that puts human safety and life into a significant risk. This behavior is considered as an anomaly concerning the regular traffic in public transportation roads. Recent techniques in deep learning proposed new approaches for anomaly detection in different contexts such as pedestrian monitoring, street fighting, and threat detection. In this paper, we propose a new anomaly detection framework applied to the detection of aggressive driving behavior. Our contribution consists in the development of a 3D neural network architecture, based on the state-of-the-art EfficientNet 2D image classifier, for the aggressive driving detection in videos. We propose an EfficientNet3D CNN feature extractor for video analysis, and we compare it with existing feature extractors. We also created a dataset of car drifting in Saudi Arabian context https://www.youtube.com/watch?v=vLzgye1-d1k . To the best of our knowledge, this is the first work that addresses the problem of aggressive driving behavior using deep learning.